基于PowerPC的小目標檢測系統設計

摘 要:小目標檢測與硬件實現技術是決定精確制導武器性能的關鍵技術之一,其難點在于如何解決運算量大、實時性要求高與系統小型化要求之間的矛盾。選取了動態規劃小目標檢測算法,分析了其算法特點與資源需求,在此基礎上提出并實現了基于嵌入式PowerPC處理器硬核的SOPC解決方案。系統的調試結果證明,這一設計方案能夠實時完成小目標檢測的任務。
本文引用地址:http://www.104case.com/article/195082.htm1 引 言
小目標檢測系統的任務是根據探測器獲取的圖像序列實時地把小目標從噪聲中檢測出來,它的實現是目標識別跟蹤的前提和基礎。小目標檢測需要對探測到的圖像進行實時處理,運算量巨大。另外,特殊的應用環境又對小目標檢測系統在低功耗、輕小型化等方面提出了更高的要求。因此,完成小目標檢測任務不僅需要尋求合理的小目標檢測算法,在實現時還需要考慮處理性能和體積功耗。
2 DPA算法簡介
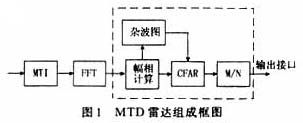
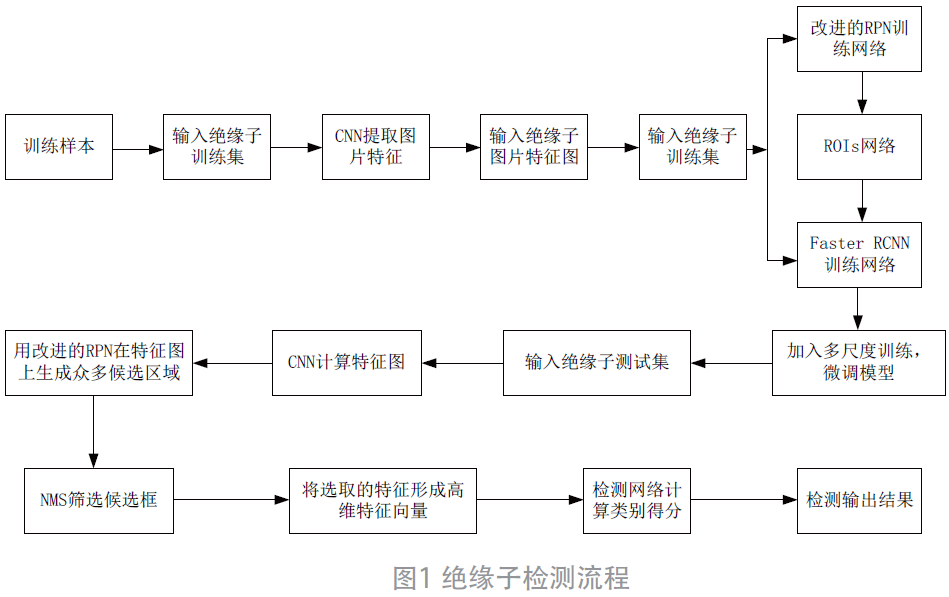
探測器與目標較遠時,目標在紅外圖像上的成像面積很小,一般不超過探測器像元的大小,因此表現為小目標,而且圖像信噪比很低。低信噪比條件下的小目標檢測,首先要解決的是目標能量積累的問題。基于動態規劃的能量累加算法(DPA算法)可以對小目標進行有效的能量積累。如圖1所示,DPA算法主要包括三個部分: ①基于動態規劃的小目標能量累加; ②門限分割; ③基于軌跡關聯與置信度檢驗的目標軌跡處理,下面對這三部分進行簡單介紹。

圖1 小目標檢測算法結構圖
基于動態規劃(DP)的能量累加算法是一種典型的先跟蹤后檢測算法。在多幀圖像序列中首先估計目標的運動軌跡,沿軌跡進行目標能量積累,然后對能量積累后獲得的圖像進行檢測判決。由于目標能量在不同幀之間是相關的,而噪聲在不同幀之間是不相關的,因此沿目標軌跡上的能量積累將大于非目標軌跡上的能量積累,能量積累后的圖像有效提高了信噪比,從而獲得較好的檢測性能。
經過動態規劃能量累加后的圖像為灰度累加和圖像,此時目標點的能量遠大于噪聲,因此可以根據某一準則確定分割門限,剔除絕大部分噪聲軌跡點,獲得候選目標點集,進而完成目標檢測。
經過目標能量累加和恒虛警門限分割后,得到候選目標集。從這些候選目標集中找到真實目標的軌跡,共需要四部分的工作:新軌跡的建立、軌跡關聯匹配、目標軌跡狀態預測、滑動軌跡置信度檢驗。
3 系統實現
根據前面對小目標檢測算法的特點分析,動態小目標能量累加算法操作簡單,運算量大,處理時間要求嚴格,適合用硬件實現;而軌跡關聯算法操作復雜,但處理的數據量小、時間相對寬裕,適合用軟件來實現。在綜合考慮了系統的體積、功耗、穩定性等因素后,最終選取了SOPC的實現方案,將整個系統集成于一塊核心芯片———Virtex - 4 FPGA上。能量累加由構建于FPGA內部的專用硬件子系統來完成;軌跡關聯部分則由Virtex - 4 FPGA內嵌的PowerPC405處理器來完成。










評論