鐵路檢測儀中陀螺儀的信號采集電路設計

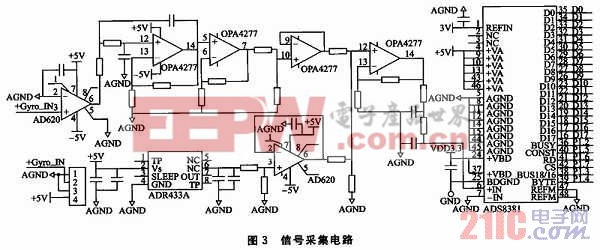
該系統選用的陀螺儀信號輸出電壓范圍為-3~+3 V,在實際使用中,其輸出電壓在-O.03~+O.03 V之間浮動。由于陀螺輸出的信號較弱,而選用的A/D芯片有效的轉換電壓范圍是0~3 V,所以對陀螺儀輸出信號放大10倍,并平移1.5 V,這樣就能保證信號能在A/D芯片有效的信號采集范圍內。設定陀螺輸出信號為Vin,進入A/D芯片的信號電壓為Vi,那么就有:
Vi=10×Vin+1.5 V
由于Vin輸出電壓信號很微弱,如果此處平移的1.5 V不夠精確,就會直接降低陀螺儀信號的準確性,因此對信號平移電路的設計提出了很高的要求。為此電路中采用了ADR433A芯片,盡量保證獲取1.5 V電壓的精度。根據上述分析,設計的信號采集電路如圖3所示。A/D轉換芯片采用ADS8381。本文引用地址:http://www.104case.com/article/195037.htm
3 軟件設計
3.1 軟件流程
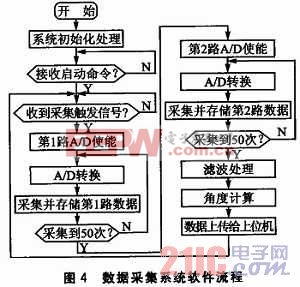
數據采集系統軟件流程如圖4所示。系統接收到啟動命令后,開始啟動系統電路。啟動后,系統首先等待采集觸發信號。當接收到采集觸發信號時,單片機發送信號分別選取兩路A/D芯片工作,A/D芯片分別對兩路陀螺儀輸出數據進行A/D轉換。由于選用的A/D芯片的轉換速率為580 kHz,能夠在0.18 ms內完成100次數據采集,實際上每路陀螺信號采集50次求平均值,因此可以認為兩路信號是同時被采集的。然后,單片機對采集到的兩組數據分別進行數據濾波、角速度計算等處理以獲取角度數值,并把這兩組數據上傳給上位機進行后續處理。
3.2 電壓補償推導
陀螺儀在靜止狀態下輸出的電壓信號為零,當陀螺儀的姿態持續改變時,其輸出的信號也會隨之改變。基于陀螺儀的這種特性,檢測儀開始運行前默認陀螺儀輸出的電壓為0 V,并以平移的1.5 V作為相對零點。在實驗過程中發現,所采集的軌向和高低數據與理論推算值浮動較大,針對這一問題,在該系統中采用電壓補償方法進行解決。本文提出了動態電壓補償方法,提高了實際相對零點精度。在介紹這種方法的推導之前,先說明一些符號的含義。
SF:標度因數(比例系數)。
Ugyro:陀螺儀輸出信號電壓。
Ucode:理想狀態下,A/D轉換前獲取電壓轉換的二進制編碼。理想狀態下,P·Ucode=10·Ugyro+1.5 V。
注意:A/D轉換前獲取的電壓為陀螺輸出信號放大10倍且平移1.5 V后的信號。
Ucode0:實際測量條件下,A/D轉換前獲取電壓轉換的二進制編碼。
ω:陀螺輸出的角速度。ω=Ugyro/SF=(P·Ucode-1.5 V)/(10SF)。

理論上,陀螺儀輸出信號被放大10倍并平移1.5 V,陀螺輸出的信號經過單片機處理后上傳給上位機。連續狀態下陀螺儀的角度計算如下: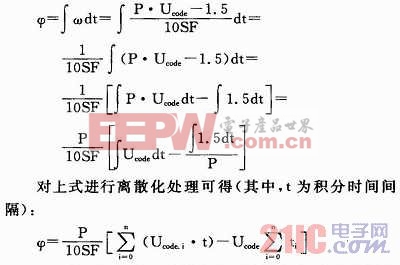

評論