基于WLS-KF的GPS非線性動態(tài)濾波研究

式中:wk,vk和εk為相互獨立的高斯白噪聲序列,wk~N(0,10),vk~N(0,10),εk~N(0,1)。此系統是具有可加噪聲的離散非線性時變系統,觀測時間為100 s,觀測周期為1 s。WLS-KF和EKF,UKF算法的二維預測結果分別如圖1,圖2所示,預測結果誤差分析見表1。本文引用地址:http://www.104case.com/article/194921.htm

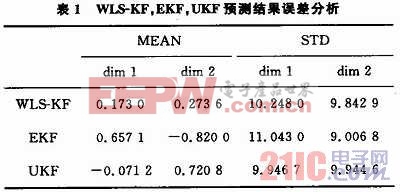
為便于比較,算法中使用的隨機數據均來自于提前保存好的隨機序列。結果表明,WLS-KF算法的計算量適中,精度介于EKF和UKF之間,且效率同KF接近。
3 結語
本文引入了一種基于加權最小二乘的線性化方法,將其與KF算法相結合,給出了可以應用于GPS非線性動態(tài)濾波系統的WLS-KF算法。該算法不需要求偏導數,算法精度介于EKF和UKF之間,可以實現對目標較高精度的定位和跟蹤,有一定的應用價值。

濾波器相關文章:濾波器原理
濾波器相關文章:濾波器原理
電源濾波器相關文章:電源濾波器原理







評論