基于微處理器的寬頻帶相位測量系統的設計與應用

3 測試結果與分析
兩路同頻輸入信號是由一個相位差可調節的高精度信號源產生。當輸入信號頻率小于30 kHz時,由ADuC7128 內部計數器直接計數,經過數據處理后得出相位差。輸入信號在進行過零比較時,由于兩路輸入信號之間的電平不相等所引起的幅相誤差,使得整形后產生的方波有所失真。圖5 是兩路輸入信號為100 kHz,相位差75°的正弦波信號,經過頻率變換及濾波整形后,兩個信號的相位保持不變,頻率變為30 kHz、幅度線性變化,如圖6 所示。

圖5 兩路相位差75°的正弦波信號

圖6 兩路相位差75°的方波信號
隨機抽取四個不同頻率的輸入信號,分別在相位差為0 ~ 150°的范圍內進行測試,測試結果見表1。
表1 測試結果
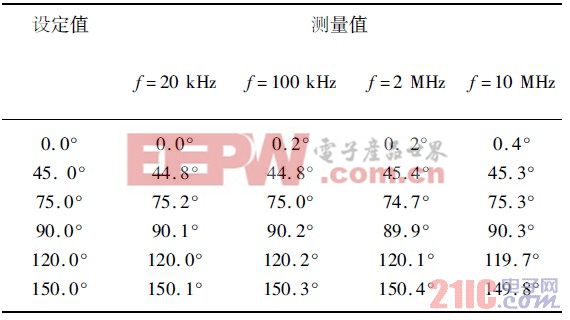
測量結果表明該系統的最大測量不確定度為± 0. 4°,基本滿足了預期≤0. 5°的設計要求。主要誤差源是ADuC7128 內部計數器只能進行整數計數,而引起的± 1 的計數誤差,該誤差可以采用多次測量求平均值的軟件方法進行修正。同時,兩路信號通道內部硬件電路結構存在差異,也是造成測量誤差的原因,解決此類誤差只能在設計對稱結構的硬件電路時,盡量選用相同的元器件。
4 結論
為了解決寬頻信號相位測量精度與微處理器主頻之間的矛盾,本文通過引入差頻變換原理,設計出一種基于ADuC7128 微處理器的寬頻帶相位測量系統。該系統能夠完成輸入信號在0 ~ 10 MHz范圍內的相位測量,測量分辨率可達0. 1°,通過使用ADuC7128 芯片內部DDS 模塊,節省了硬件成本,同時也降低了電路設計的復雜性,增加了系統的可靠性。試驗表明,該系統設計方案可行、測量結果準確。如果直接選擇主頻較高的微處理器或者通過時鐘倍頻的方法提高計數脈沖速度,在此設計方案基礎上,就能夠進一步拓寬相位測量的頻帶。










評論