基于微處理器的寬頻帶相位測量系統的設計與應用

在本系統中,首先打開CH1 通道上的模擬開關,使被測信號繞過頻率轉換電路,而直接進入比較器LT1715 進行整形,然后ADuC7128 利用內部計數器T0 產生的標準計數脈沖對整形之后的脈寬信號進行高速填充。如果計數值為N,標準計數脈沖的周期為ΔT,則輸入信號的頻率為f,周期為T:

DACOUT 是一個用來設置ADuC7128 內部DDS 輸出頻率的一個控制信號,在本設計中,當輸入信號的頻率超過30 kHz 時,ADuC7128 內部DDS 保持產生一個與輸入信號頻率相差30 kHz 的正弦波信號,作為頻率轉換的參考信號。
經過混頻、低通濾波、整形比較之后的兩路正弦波信號,已經變成頻率在30 kHz 以下的方波信號Q1 和Q2。IRQ0、IRQ1 是ADuC7128 的兩個中斷引腳,分別將Q1 的輸出端與ADuC7128 的IRQ0 引腳連接,Q2 的輸出端與ADuC7128 的IRQ1 引腳連接。
IRQ0 用于檢測Q1 信號的下降沿,一旦Q1 信號的下降沿到來時,ADuC7128 內部計數器T1 開始工作,IRQ1 用于檢測Q2 信號的下降沿,一旦Q2 信號的下降沿到來時,ADuC7128 內部計數器T1 停止工作。這樣,計數器T1 上的累計值就是兩個方波間隔的脈沖數n,如果已知T1 的計數間隔Δt',即可知兩個方波的時間間隔Δt:

從而通過公式( 8) 即可計算出兩輸入信號的相位差θ。

2. 2 軟件設計
本系統的軟件設計主要是完成系統初始化、內部數據處理、數據結果顯示等功能。圖4 是系統的主程序和相位測量流程圖。
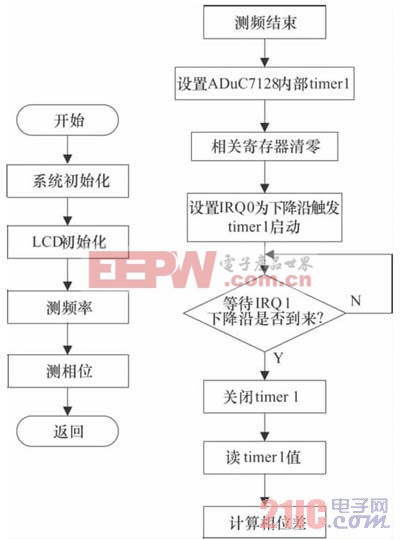
圖4 主程序和相位測量流程圖










評論