基于LabVIEW的重力儀仿真與測(cè)試系統(tǒng)設(shè)計(jì)

摘要:介紹基于LabVIEW的虛擬重力儀的設(shè)計(jì),它是由數(shù)據(jù)采集卡采集外部信號(hào),通過(guò)軟件編程實(shí)現(xiàn)儀器的顯示及測(cè)量等功能。該虛擬重力儀主要由數(shù)據(jù)采集、數(shù)字濾波、參數(shù)測(cè)量、頻譜分析、功率譜分析和波形存儲(chǔ)及讀取模塊組成,具有傳統(tǒng)儀器所沒(méi)有的許多優(yōu)點(diǎn),如能保存波形及測(cè)量結(jié)果、成本低廉,可以根據(jù)需要進(jìn)行功能拓展等。實(shí)驗(yàn)證明,該虛擬重力儀運(yùn)行可靠、性能良好和結(jié)果正確。
關(guān)鍵詞:虛擬儀器;重力儀;LabVIEW;軟件編程
重力儀是用于測(cè)量重力的專業(yè)儀器,傳統(tǒng)的重力儀外型笨重、功能單一,數(shù)字重力儀雖然有一定的功能擴(kuò)展,但價(jià)格昂貴,而且這些儀器加工工藝復(fù)雜、對(duì)制造水平要求很高,生產(chǎn)突破有困難。虛擬儀器的出現(xiàn)改變了這一局面,虛擬重力利用計(jì)算機(jī)系統(tǒng)強(qiáng)大的數(shù)據(jù)處理能力,利用軟件完成數(shù)據(jù)的采集、控制、數(shù)據(jù)分析和處理以及測(cè)試結(jié)果的顯示等,大大突破了傳統(tǒng)儀器在數(shù)據(jù)處理、顯示、傳送、存儲(chǔ)等的限制,使用戶可以方便地對(duì)儀器進(jìn)行維護(hù)、擴(kuò)展和升級(jí),而且虛擬重力儀比傳統(tǒng)重力儀節(jié)約了許多成本,具有很高的性價(jià)比。本文介紹虛擬重力儀的設(shè)計(jì),用圖形化編程語(yǔ)言LabVIEW實(shí)現(xiàn)虛擬示波器的數(shù)據(jù)采集、波形顯示、數(shù)字濾波、參數(shù)測(cè)量、頻譜分析、功率譜分析以及數(shù)據(jù)存儲(chǔ)和回放等功能。實(shí)驗(yàn)證明,該虛擬重力儀可以實(shí)現(xiàn)對(duì)采樣信號(hào)的顯示、分析、存儲(chǔ)等操作并且結(jié)果正確、可靠,功能比傳統(tǒng)儀器強(qiáng)大。
1 虛擬示波器的結(jié)構(gòu)
根據(jù)實(shí)際重力儀傳感器的特點(diǎn),以及動(dòng)基座下重力儀工作的特點(diǎn),設(shè)計(jì)了重力儀模擬器,用于模擬運(yùn)動(dòng)基座下重力儀的測(cè)量輸出。
重力儀模擬器的框圖如圖1所示。
效應(yīng)、量測(cè)噪聲等因素的影響。在模擬仿真中需要對(duì)這些因素進(jìn)行仿真設(shè)計(jì)。模擬器運(yùn)行時(shí),首先需要規(guī)劃載體航跡和重力值。在航跡規(guī)劃中,設(shè)定每段路程航向、航速、經(jīng)歷的時(shí)間。規(guī)定完載體運(yùn)動(dòng)航跡后,便可得到每一點(diǎn)的正常重力值。由于海洋重力儀傳感器采用相對(duì)重力測(cè)量法進(jìn)行重力測(cè)量,其敏感量為實(shí)測(cè)點(diǎn)重力值與重力基點(diǎn)重力的差值。因此,重力圖生成中,只需要設(shè)定當(dāng)前重力與初始點(diǎn)位置的重力差,即重力輸入信號(hào)取△g=g-g0。海洋中進(jìn)行重力測(cè)量不可避免受到海浪、載體運(yùn)動(dòng)等造成的干擾加速度的影響。根據(jù)分析,干擾垂直加速度具有似周期性的特點(diǎn),并且與重力加速度的頻率和幅值有明顯的差異。因此在模擬器中,垂直方向上干擾加速度可以寫(xiě)為:R=R0sinωt。R0為輸入干擾加速度的幅值,ω為干擾加速度的角頻率。
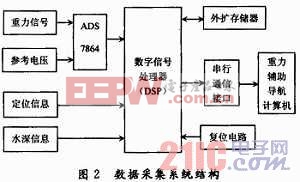
效應(yīng)造成的重力偏差與載體航向、航速、載體所處緯度有關(guān)。該值通過(guò)計(jì)算當(dāng)前位置的航向、航速和緯度求得。實(shí)時(shí)處理系統(tǒng)的硬件主要包括數(shù)字信號(hào)處理器及其外圍電路、A/D轉(zhuǎn)換模塊、串行通信接口模塊等。其中,微處理器模塊控制系統(tǒng)的運(yùn)行,完成數(shù)據(jù)的處理。 A/D轉(zhuǎn)換模塊完成模擬信號(hào)到數(shù)字信號(hào)的轉(zhuǎn)換,實(shí)現(xiàn)重力信號(hào)的采集。串口通信模塊主要完成微處理器與導(dǎo)航計(jì)算機(jī)通信,實(shí)現(xiàn)外界信息的獲取以及相關(guān)數(shù)據(jù)上傳。系統(tǒng)上電以后,啟動(dòng)A/D轉(zhuǎn)換采集重力儀的輸出信號(hào),并同時(shí)接收精確定位數(shù)據(jù)信息和水深信息。系統(tǒng)的數(shù)據(jù)處理軟件將對(duì)采集到的重力儀信號(hào)進(jìn)行干擾加速度影響消除,重力儀自身誤差改正,最后根據(jù)定位數(shù)據(jù)和水深數(shù)據(jù)對(duì)濾波后的重力信息進(jìn)行改正,如改正和吃水改正。其中,改正需要和重力信號(hào)采集相互匹配,從而獲取實(shí)時(shí)重力數(shù)據(jù)。數(shù)據(jù)處理結(jié)果通過(guò)串行通信接口上傳到重力輔助導(dǎo)航計(jì)算機(jī),由該計(jì)算機(jī)完成重力輔助導(dǎo)航的相關(guān)解算。系統(tǒng)結(jié)構(gòu)圖如圖2所示。








評(píng)論