基于超聲測速技術的數字大氣環境因素測量儀

這樣就可以得到兩組時間數據,t12,t21和t34,t43。設t12和t21為東西方向傳播時間,t34和t43為南北方向傳播時間;VWX為風速的東西方向分量,VWY為風速的南北方向分量,超聲波的速度為Vs。則可以利用獲得的時間量準確地求出風速的大小和方向,具體計算過程如下
VW和cosθ即為所求量。
(3)二維風速測量方案改進。
由于使用的超聲波傳感器探頭中心頻率為40~50 kHz,超聲波的頻率較低導致其波長約為0.5~1 cm,系統單次發射的超聲波約為10~20個周期的脈沖,為防止兩次發射和接收之間出現超聲波疊加,所以相對探頭之間的距離較大,增加了測速的環境誤差,也影響美觀。這里為改善這些問題,使用一個反射系數大的反射板放置于超聲探頭頂端,使發射的超聲波經過反射傳播給接收探頭,減少水平距離。具體方案如圖4所示。本文引用地址:http://www.104case.com/article/194584.htm
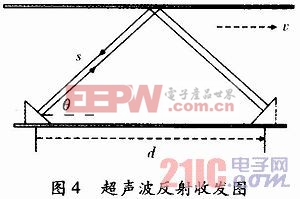
在計算時加入發射偏角即可,不會增加運算難度。
(4)測速誤差分析。
發射器發出的超聲波以速度v在空氣中傳播,在到達被測物體時被反射,由接收器接收,其往返時間為t,由s=vt/2即可算出被測物體的距離。由于超聲波也是一種聲波,其聲速v受溫度影響較大,表1列出了幾種不同溫度下的聲速。在使用時,如果溫度變化不大,則可認為聲速基本不變。如果測距精度要求很高,則應通過溫度補償的方法加以校正。

2 系統總體設計方案
系統整體分為:超聲波發射接收模塊、含有MSP430單片機的中央處理模塊、實時顯示模塊、無線發射等模塊。







評論