基于虛擬儀器的車輛稱重傳感器的分析

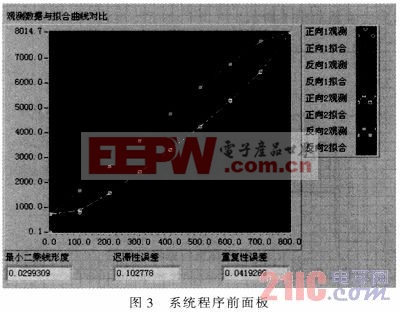
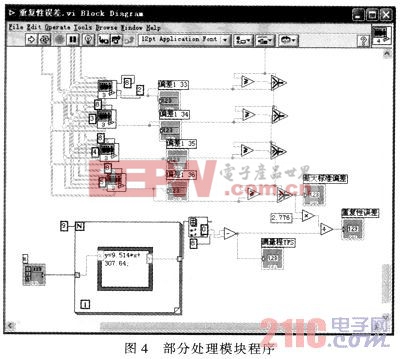
軟件編程采用模塊化設(shè)計,主要包括曲線擬合模塊、直線擬合和誤差分析模塊等。誤差分析模塊中的最小二乘線性度、遲滯性誤差以及重復(fù)性誤差都采用子VI的形式,這為動態(tài)參數(shù)的分析編程提供了很大的方便。誤差處理模塊主要是在分析數(shù)據(jù)的過程中,對數(shù)據(jù)的重復(fù)性誤差、最大標(biāo)準(zhǔn)偏差和遲滯性誤差等進(jìn)行分析處理。這些數(shù)據(jù)為后續(xù)的數(shù)據(jù)處理和電容稱重傳感器補償系統(tǒng)編程作為依據(jù),如重復(fù)性誤差編程如圖4所示。為了掌握加速度對電容法車輛載荷檢測的影響情況,根據(jù)預(yù)先標(biāo)定出的載荷質(zhì)量與電容傳感器輸出電壓之間的對應(yīng)關(guān)系,得到某一加速度(aH)下前、后輪軸以及整車的載荷質(zhì)量,結(jié)果見表1。





評論