FPU加法器的設計與實現(xiàn)

2 加法器的設計實現(xiàn)
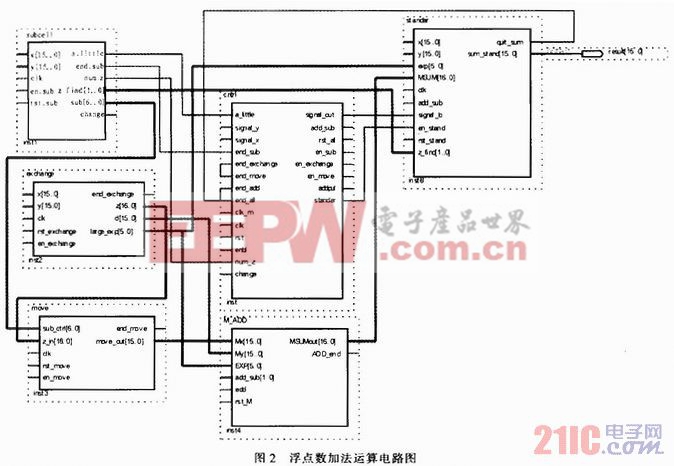
2.1 電路原理圖
浮點加法運算模塊電路原理如圖2所示。主要由6個模塊構成,分別是Subcell模塊、exchange模塊、move模塊、M_add模塊、standat模塊、cntrl模塊。下面將分別對這6個模塊進行介紹。本文引用地址:http://www.104case.com/article/193319.htm
1)Subcell模塊
此模塊的功能主要有以下4個方面:①0操作數(shù)的檢查。將有關信息送到cntrl模塊和standar模塊,用于決定是否進行后續(xù)操作,以便節(jié)省運算的時間。②階碼大小的比較。將小數(shù)a_little傳送到cntrl模塊。③對階。比較兩個操作數(shù)的階碼,求出它們階碼的差值sub[6..0],送到move模塊。④當這個模塊運算結束或者有新操作數(shù)輸入時,告知cntrl模塊。
在圖2中,當rst_sub=‘0’,此模塊就正常工作;若rst_sub=‘1’,則所有的輸出都是0。在零操作數(shù)檢查的過程中,如果發(fā)現(xiàn)有0操作數(shù)的存在,則就令num_z=‘1’;在此操作數(shù)的檢查過程中還可以區(qū)分到底是哪一個操作數(shù)為零,假如操作數(shù)x為零,則就令z_find=“0 1”;若是操作數(shù)y為零,則就令z_find=“10”;若無0操作數(shù),則z_find=“00”。當對參與運算的兩個操作數(shù)進行0操作數(shù)判別結束后,本模塊在實現(xiàn)的過程中主要采用了5個條件語句來實現(xiàn)兩個操作數(shù)大小的比較,通過比較可以算出階碼的差值。若兩數(shù)的階碼相同,即小數(shù)點是對齊的,則進行位數(shù)的比較,當然這所有的比較都是通過不同的條件語句來實現(xiàn)的。所有的比較完畢,end_sub設為1。當有新的數(shù)據(jù)從x,y端輸入的時候,根據(jù)程序的設置,相關進程會被喚醒,控制模塊接收到進程發(fā)送來的脈沖change,就知道有新的操作數(shù)據(jù)輸入,因此再次啟動控制模塊,進而進入另一個新的周期。
2)exchange模塊
此模塊的功能為:①向move模塊輸入小冪次浮點數(shù)尾數(shù),②向M_ADD模塊輸入大冪次浮點數(shù)尾數(shù)。
此模塊包含一個Process進程,當rst_exchange=‘0’并且en_exchange=‘1’,浮點數(shù)x,y的冪和尾數(shù)被拆開,存入不同變量。然后執(zhí)行本模塊所設置的4個條件語句,分別對兩個浮點數(shù)進行處理,一方面將冪次小的操作數(shù)位數(shù)進行擴充,擴充為33位后傳送到move模塊中;另一方面將冪次大的操作數(shù)擴充成32為傳送到M_ADD模塊中。進程結束后,end_exchange置高電平,告知控制模塊。
3)move模塊
此模塊的功能主要是為了實現(xiàn)兩個操作數(shù)的對階。在這個模塊中設計了一個進程process(clk),它以clk為敏感信號,此進程還包含有2個條件語句模塊。第1個模塊主要是對變量進行更新。第2個模塊主要是判斷移位是否已經結束,并對相應的標志位進行設置。假如所移操作數(shù)的后8位是不為0的,那么在每個時鐘的上升沿到來時繼續(xù)進行向右的移動。
4)M_add模塊
此模塊的主要功能是對階完成以后,對尾數(shù)進行運算。通過在每個尾數(shù)前加一位0來檢測運算結果是否需要規(guī)格化。程序如下:
在進行加減法運算中分兩種情況:當add_sub=“11”,執(zhí)行Mx+My;當add_sub=“00”,執(zhí)行Mx-My。具體由Cntrl模塊的分析中給出。
5)standar模塊
此模塊的主要功能是對浮點運算的結果進行規(guī)格化處理。這個模塊中有兩個變量分別是ntemp和texp,該模塊在首次執(zhí)行時對它們進行初始化,否則只有當控制模塊發(fā)出rst命令的時候才能對它們的初始值進行改變。當add_sub的值不同時,則將條件語句分成了不同的部分:
①當add_sub的取值為“00”或者當其取值為“01”的時候,可得M_ADD模塊進行的是減法運算;如果運算結果是0,那么就直接將0輸出;假如運算結果不為0,就需要對numb(15)進行考慮;假如其值是1的話,就不需要進行左移,直接執(zhí)行語句:“sum_standar=signal_b temp_exp(5 downto0)ntemp(14 downto 6);”。但是如果numb(15)的值是為0的,就需要進行左移。
②當add_sub=‘11’時,則M_ADD模塊執(zhí)行加法運算;如果numb(16)的值為1,就需要進行右移。而當numb(16)的值為0時,則不用進行規(guī)格化,直接輸出。
6)cntrl模塊
在這個模塊中主要采用的是Mealy狀態(tài)機,它和輸入、輸出、狀態(tài)皆有關;一方面Mealy狀態(tài)機要完成其狀態(tài)的轉化,需要等待本模塊中CLK_m時鐘信號的上升沿。另一方面如果subcell模塊有了新的操作數(shù)的輸入,本模塊收到告知信號后,會將狀態(tài)機重新運行。
在此對本設計模塊中所使用狀態(tài)機所包含的各個部分進行簡要的闡述:
①說明部分
本部分主要是在ARCHITECTURE和BEGIN之間,用TYPE語句定義枚舉型的數(shù)據(jù)類型(包含既定狀態(tài)元素)status,狀態(tài)變量xt_status和ct_st atus定義為信號signal。主要用以下語句實現(xiàn):
type status is(rst1,rst2,rst3,rst4,rst5,rst6,rst7);
signal xt_status,ct_status:status;



評論