基于FPGA的電動機微機保護實現方法

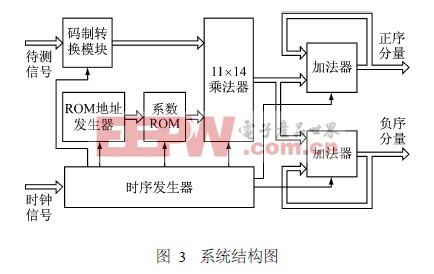
出口模塊主要負責裝置內外的電氣隔離,一 方面將來自處理器模塊的動作、報警等信號隔離 后,送到裝置外部;另一方面將來自裝置外部的斷 路器狀態等信號進行隔離后,送到處理器模塊。 根據功能控制工程網版權所有, FPGA芯片內部被劃分為兩部分: 算法實現模塊和軟核CPU (Nios)模塊。前者由 VHDL模塊化編寫算法的實現過程,由于采用并 行結構,可以實現多路信號同時濾波;后者為軟件 編寫人機界面、通信協議等構建平臺,并且同時根 據算法實現模塊的結果,執行保護動作。在只考 慮一路信號的情況下,本系統由以下各部分組成。 (1) 碼制轉換器:將AD采樣的輸出數據轉 換成準確的16進制數。
(2) 乘法器:采用陣列乘法器結構,為確保系 數精度控制工程網版權所有,系數以15位二進制數逼近,故乘法器采 用11 ×14位的結構。
(3) 累加器:由于乘法器的輸出有正有負,所 以累加器也必須有加有減。通過對乘法器輸出符 號的判斷CONTROL ENGINEERING China版權所有,自動判斷加減。
(4) 時序發生器:這是整個系統的心臟,由它 來調度什么時候什么模塊做什么事。本系統采用 一個正相分頻器和一個反相分頻器作為時序控制 模塊。
系統結構如圖3所示。本文引用地址:http://www.104case.com/article/191857.htm
3 保護算法模塊
3. 1 信號處理模塊
采樣信號的濾波采用最小二乘法,這是一種 波形擬合方法,當預設的信號模型能充分描述被 采樣信號時,該算法可以濾除信號中任意需要濾 除的分量,因此具有很好的濾波性能和很高的運 算精度。其原理是:為被采樣信號預設一個盡可 能逼近的信號模型函數,并按最小二乘擬合原理對其進行擬合。
假定采樣頻率為1 000 Hz,被采樣信號為: Ia = 10 - 10cos (2 ×pi ×f ×t) + 2cos ( 2 ×2 ×pi × f ×t) + 5 sin (3 ×2 ×pi ×f ×t) + sin ( 4 ×2 ×pi × f ×t) + 0. 5 sin (5 ×2 ×pi ×f ×t) 可見,信號有直流分量,而且諧波分量最高為 5次。以N = 11點采樣進行MATLAB仿真,得到 如圖4所示的波形。可以看到濾波后的正弦波 振幅等于10,所以11點采樣能滿足要求。
在采樣頻率為1 000 Hz,采樣點數N = 11的 情況下,系統雖然收斂,但采樣系數的離散度很 大,勢必造成乘數的位寬很寬,乘法器需要耗費很 多的資源。所以可適當增加采樣點數來降低離散 度。但是如果單純增加采樣點數,最小二乘法濾 波的高速特性就無法體現。因此將采樣頻率提升 到2 000 Hz,采樣點數增加到26點(即1 000 Hz 下, 13點采樣的時間) ,可以將離散度降到可接受 的程度,而且濾波速度也不會降低太多。仿真波 形和系數矩陣分別如圖5和表1、2、3所示。

電動機相關文章:電動機工作原理設計
分頻器相關文章:分頻器原理








評論