基于FPGA的CAN總線通信接口的設計

2.3 CY7C68013A通信控制程序
CY7C68013A提供一種量子FIFO的處理架構,使USB接口和應用環境直接共享內部含有的4 K FIF0空間。本文CY7C68013A的控制是以異步SLAVE FIFO方式實現的,FPGA對CY7C68013A的邏輯控制實際上是對CY7C68013A內部FIFO的異步讀寫控制。設置CY7C68013A端點2為批量輸入端點(FIF0地址為00),端點6為批量輸出端點(FIF0地址為1O)。FPGA判斷CY7C68013A的PA[1:0]端口電平,當PA[1:0]為01時,FPGA將接收到的CAN總線數據寫入端點2對應的FIF0空間并上傳給上位機,PA[1:0]為10時,FPGA讀取端點6對應的FIFO內數據。FPGA對CY7C68013A的時序控制嚴格按照芯片手冊完成。
由于USB數據包與CAN數據幀是基于兩種不同協議的數據格式,因此在FPGA內開辟了2個512x8bit的FIFO緩存,并要進行必要的格式轉換。例如,當從USB總線端注入的數據大于8字節時,需要將數據分成多幀傳送給CAN總線;當數據小于8字節時則在數據后填充0。另外,在數據傳送給CAN總線之前還需要添加適當的幀信息與幀識別碼。
3 軟件設計
3.1 USB固件程序
USB固件程序是在Keil工具上開發完成的,除了進行必要的端點及寄存器配置外,程序中使用了自定義請求命令。自定義請求碼通過USB控制傳輸的方式傳送給固件,固件程序需要響應自定義請求碼的請求信息。本文使用的自定義請求碼為Oxa8,在響應代碼中設置端口PA[1:0]電平值,產生USB控制命令,代碼如下所示。SETUPDAT[2]對應控制傳輸端點的Value值,由上位機應用程序設定。
3.2 USB驅動程序及應用程序
使用CYPRESS公司提供的CY7C68013A通用驅動程序CyUSB.sys。上位機應用程序使用VC編寫,也是基于Cypress提供的C++類庫文件CyAP-I.lib設計完成的。使用的主要函數包括:BeginDataXfer、FinishDataXfer、XferData等函數。應用程序中設計了獨立的數據接收線程,線程函數中不斷地發送USB數據讀命令,并完成批量輸人端點的讀操作。當有數據讀入時,與主線程之間采用事件的線程同步方式,將數據讀入計算機內存并保存。以下是線程函數中用于發送USB控制命令的控制傳輸代碼:

4 實驗調試與結果
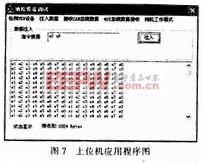
為驗證設計的正確性,使用了周立功公司的USBCAN-I產品,與目標電路板組成雙節點通信,2個節點設置相同波特率500 Kb/s(BTRO= 00,BTR1=1Ch)和相同幀格式,由測試軟件ZLGCANTest發送一組數據(eOh,e1h,……,e7h),上位機應用程序接收到的數據如圖7所示。反過來由上位機應用程序注入指令數據e0h,a8h,周立功軟件接收到的數據為e0h,a8h,00h,OOh……。經實驗表明,數據收發正確,近距離通信時,通信速率可高達1 Mb/s。
5 結論
使用該方法設計的CAN總線轉換器優點在于:使用USB總線完成CAN總線與計算機的數據交換,不會影響CAN總線的整體通信速率;通過FPGA控制完成通信接口的設計,可擴展性好,靈活性強,穩定性高。作為空間相機下位機地檢設備的一部分,FPGA同時還可以完成RS422等總線的通信控制。












評論