基于FPGA的GPS+GSM雙重車載定位系統設計

3 利用NiosⅡIDE進行系統軟件設計
3.1 軟件總體構成
定位系統軟件主要完成定位信息的采集和定位終端與監控中心之間的數據通信,主要由主程序、顯示程序、GPS信息處理程序和GSM信息處理程序組成。主程序完成系統的初始化、自檢、人機交互操作和定位信息的處理等功能。
3.2 GSM網絡定位及通信
目前,中國移動和中國聯通的移動通信網絡既是語音通信網絡,又是一個能提供豐富數據業務的網絡,只要當地網絡開通了位置服務功能,選用支持STK的SIM卡,即可通過STK命令得到位置信息。GSM網絡通信主要以短消息的方式進行,包括短消息的接收和發送。在短消息的收發程序設計中運用AT命令來實現,其包括定位和監控信息的編碼和解碼、通信模式設定和聯機測試、短消息的收發、收發數據的關鍵命令字的模式匹配。
3.3 GPS信號定位
在進行信號穩定跟蹤以前,首先需要實現信號的捕獲來確定信號是否存在。通用接收機對載波信號的捕獲通常采用一維的串行相關搜索。在本文所描述的高動態情況下,載波多普勒頻偏最大為±14 kHz,若選擇頻率搜索步進為500 Hz,需要57次才能完成整個28 kHz帶寬的搜索,顯然非常耗費時間。而利用傅里葉變換將信號從時域變換到頻域后,通過把原來的時域串行搜索變為頻域并行搜索,進行1次并行搜索就能等同于傳統方式下的57次串行搜索,大大節約了搜索時間。GPS定位流程如圖3所示。本文引用地址:http://www.104case.com/article/191177.htm
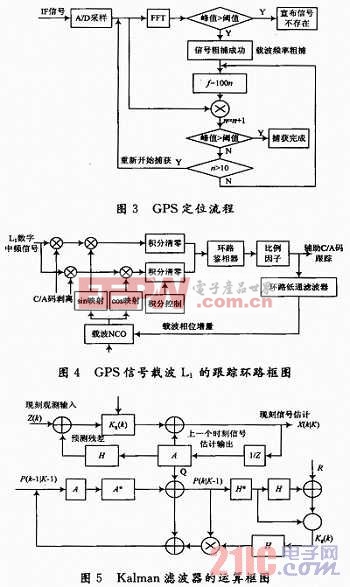
3.4 GPS信號追蹤
完成信號捕獲后,需要對信號進行精確穩定的跟蹤,保證后續導航電文的正確解調。載波跟蹤環由預檢測積分器、環路鑒別器和濾波器組成,圖4為GPS信號載波L1的跟蹤環路框圖。














評論