數控系統中基于CPLD的步進電機驅動模塊的設計

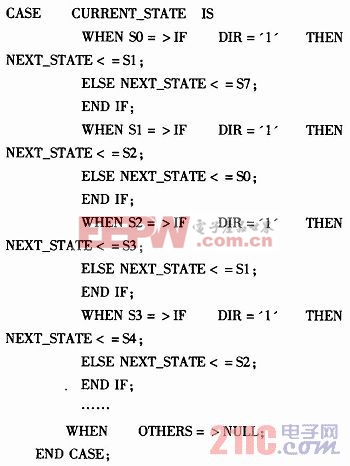
程序的結構體部分由3部分組成:說明部分,主控時序進程,主控組合進程。在說明部分中定義相關的信號及常數;在主控時序進程中負責把計算好的次態的信息送入初態,并負責最后的輸出;在主控組合進程中負責相關的計算,比如判斷啟動和停止,正轉和反轉,以及在正反轉狀態下如何取下一個狀態。下面這段程序就是結構體里主控組合進程中,如何判斷電機正反轉和下一步電機將如何動作的程序段。
3.3 系統仿真結果
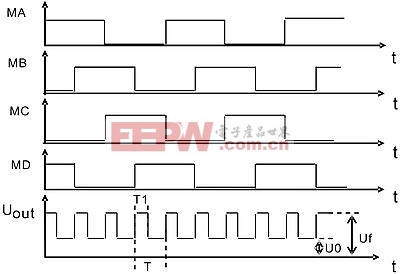
整個控制程序的軟件波形仿真如下:本文引用地址:http://www.104case.com/article/190792.htm

從圖2中可以看到,在模擬步進電機啟動、停止、正反轉時電機的狀態。比如在復位后當START=‘1’時,如果這時DIR=‘1’表示電機是正轉,則電機的通電狀態是A—AB—B—BC—C—CD—D—AD,對應的CPLD的輸出狀態就為S0~S7。當DIR=‘0’時表示電機是反轉,就圖2的截圖來說在CLK的上升沿時,輸出是狀態S2,因為它的前一個狀態從圖上我們可以看出是S1。
4 結束語
在數控系統中我們希望達到準確、高效、經濟的控制,在運動機構的控制這一環節,通過CPLD可以起到很好的效果,首先可以簡化硬件電路,提高電路的可靠性,其次可以通過對器件進行編程來改變器件的結構,達到我們預期的功能,并且通過ISP在系統可編程的方法把程序加載到器件上。
通過CPLD可控制步進電機的啟動、停止、以及正反轉,本文通過軟件仿真,驗證了方案的正確性。本文所列舉的電機是四相的,如果是三相或是五相電機,都可按本文的方法實現,如果對電機采用的單相通電的方法,也可按本文的方法實現,同樣只須稍微修改參數即可。










評論