VHDL-AMS在控制系統分析與設計中的應用

PID控制器主要由三部分組成:比例環節,積分環節和微分環節。其中比例環節反映控制系統的偏差信號e(t),偏差一量產生,控制器立即產生控制作用,以減少偏差;積分環節主要用于消除靜態誤差,提高系統的無差度;微分環節反映偏差信號的變化趨勢,并能在偏差信號變得太大之前,在系統中引入一個有效的早期修正信號,從而加快系統的動作速度,減少調節時間。
PID控制器是一種線性控制器,根據給定值r(t)與實際輸出值y(t)構成控制偏差:
e(t)=r(t)-y(t) (1)
PID的控制規律為:
式中kp為比例系數;TI為積分時間常數;TD為微分時間常數。
將式(2)寫成傳遞函數的形式:
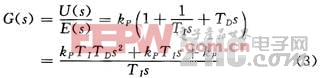
設定忌kP=60,TI=60,TD=0.05,由式(3)可對PID控制器建模如下:
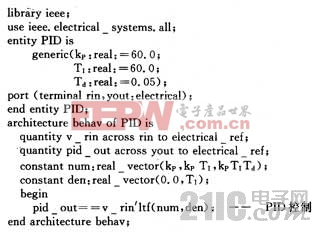
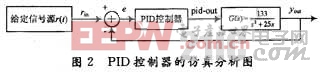
SystemVisiON是Mentor Graphics公司開發的支持VHDL-AMS的Windows集成開發環境。在SystemVision環境下,由文中的VHDL-AMS程序建立PID控制器模型,并以二階線性傳遞函數為被控對象,建立圖2所示的仿真分析系統。

pid控制器相關文章:pid控制器原理







評論