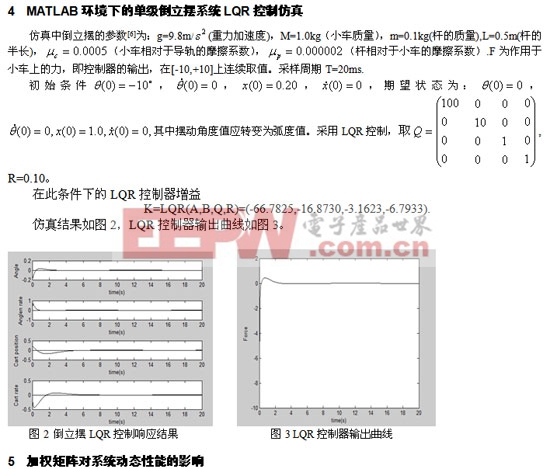
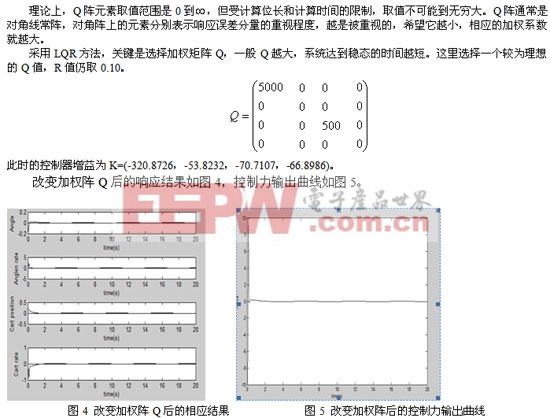
基于MATLAB的線性二次型最優控制

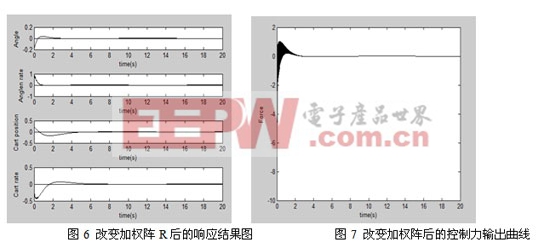
對比仿真結果可以看出,當小車擺桿角度權重選定為合適的值,隨著小車位置權重的增加,小車位移系統階躍響應超調減小,上升時間和調整時間也加快。與此同時,也引進了一些振蕩。
5.2 加權矩陣R的研究
從降低控制系統能量要求優先角度出發,讓Q不變,R減小。這時由Riccati方程求得的系統反饋增益陣K增大。例如R=0.01時,相應的K=[-175.4699,-46.1765,-10.0000,-20.8841]。
改變加權陣Q后的響應結果如圖6,控制力輸出曲線如圖7
對比仿真結果可以看出,調整時間與超調量減小,上升時間與穩態誤差減小。但是系統穩定性很差,時控過程噪聲很大。
6 結束語
本文針對倒立擺系統進行數學建模,采用最優控制中的LQR控制方法,對系統進行局部的線性化,通過仿真實驗得到該方法作用于倒立擺系統是可行且有效的,同時分析了加權矩陣Q和R對系統性能指標的影響。
參考文獻:
[1] 劉金亨,陳今潤,呂郁青,等. 基于LQR的一階直線雙倒立擺最優控制系統研究[J].自動化技術與應用,2009,28(5):11-13.
[2] 槐創鋒,方躍法. 5連桿雙足機器人建模和控制系統仿真[J].系統仿真學報,2008,20(20):82-86.
[3] 李德毅,杜鶿. 不確定性人工智能[M].北京:國防工業出版社,2005.
[4] 姜春瑞. 基于云模型理論的一階直線倒立擺控制技術研究[D]. 哈爾濱工業大學,2005.
[5] 劉豹. 現代控制理論[M]. 北京:機械工業出版社,2007.
[6] 劉金琨. 先進PID控制及其MATLAB仿真[M]. 北京:電子工業出版社,2003.1.

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理




評論