小型仿人機器人的設計及步態(tài)規(guī)劃

根據鄭元芳理論,可規(guī)劃出所設計的類人機器人的運動過程和行走步驟:重心左移(假設先邁右腿,左腳支撐)、右腿抬起、右腿放下、重心移到兩腿間、重心右移、左腿抬起、左腿放下、重心移到兩腿間,共分8個階段。這里設計的機器人具有避障功能,因此髖關節(jié)的側向旋轉自由度必不可少。所設計的機器人不考慮在不規(guī)則地面上行走問題,所以可以不設置踝關節(jié)的側向旋轉自由度。這樣設計出的機器人雖然不能站在不規(guī)則的地面上,但可以在平地上完成所有的行走過程,實現(xiàn)前行、后退、轉彎等動作。
這樣設計出的機器人腿部共有12個自由度,每條腿各6個,即踝關節(jié)前向和扭轉2個自由度,膝關節(jié)前向1個自由度,髖關節(jié)有前向、側向旋轉和轉向3個自由度。自由度的設置如圖2所示。本文引用地址:http://www.104case.com/article/188599.htm

2.2 機器人驅動元件的選擇
在驅動元件的選擇上,早期研究者曾試圖模仿人的肌肉運動方式用氣動人工肌肉作為雙足步行機的驅動元件,這種氣動人工肌肉通過橡膠管充氣膨脹引起的收縮來代替人體肌纖維的收縮運動,但由于技術水平的限制,人工肌肉在體積和力學特性等方面都與真正肌肉有較大差距,實際效果并不好。目前,大部分機器人采用伺服電機作為驅動元件。伺服電機具有速度快、扭矩大的特點,并配備雙向接口,能夠監(jiān)測當前電機位置,因此得到廣泛應用,并取得良好效果。
微型伺服電機內部包括一個小型直流馬達、一組變速齒輪、一個反饋可調電位器及一塊電子控制板,是一種可定位的直流電機,當接收到一個位置指令時,就會運動到指定的位置。微型伺服電機馬達具有高力矩、高性能、控制簡單、裝配靈活、價格低等優(yōu)點。從各方面因素考慮,本設計選用微型伺服電機作為驅動元件。該設計選用Robotis公司生產的AX-12+伺服電機,電機之間通過串口通信,由主控制器打包傳輸通信數(shù)據。
3 雙足機器人步態(tài)規(guī)劃
目前雙足機器人的步態(tài)規(guī)劃一般采用兩種方法:一種是應用數(shù)學手段通過建立機器人的數(shù)學模型進行規(guī)劃,另一種方法是模擬人的行走過程及人的生理結構。該設計采用后者。人類步行運動是以一條腿交替地作為支撐,向前擺動另一條腿,并伴以軀干和手臂的運動而實現(xiàn)的。其過程和機理非常復雜。研究表明:雙足機器人在平穩(wěn)步行的條件下,能夠實現(xiàn)上身軀和下肢的運動解耦,并易于對下身軀的各個關節(jié)角進行角度規(guī)劃,因此可利用解耦控制分別控制上身軀和下身軀的運動,并且對下身軀的各個關節(jié)角實施規(guī)劃。因此。分析和模擬人類的步行運動時,應重點抓住下肢的主要動作特點和要領。
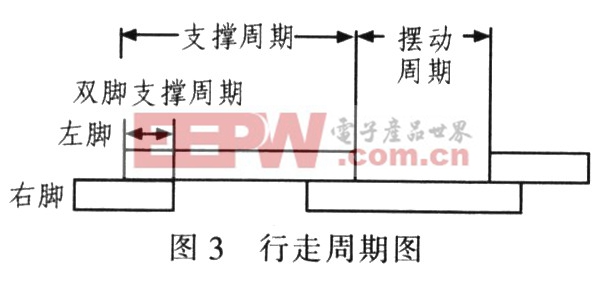
3.1 人體步態(tài)周期研究
人體在行走的過程中,其重心不斷地周期性移動和改變,在任何時刻至少有一只腳與地面接觸,而其中一段是兩只腳同時著地。單支撐和雙支撐交替進行,但只有單支撐和雙支撐在行走周期中所占比例合理,才能保持身體平衡。以一個周期為研究對象,比例分配如圖3所示。


評論