基于ADSP-BF533的高度跟蹤系統

該系統輸入中頻信號為3~10 mV的微小差頻信號,因此需將它們放大到可滿足A/D轉換芯片的輸入電平2Vpp左右,需放大40~60 dB。該系統所采用的AD2613為四級放大器,增益分別為25dB、40dB、25 dB、40dB,其中第一級和第三級采用硬件控制其放大倍數,可利用三個放大倍數控制管腳LNP1、LNP2、LNP3,通過不同的相互連通方式,來控制這兩級放大器的放大倍數。而第二級和第四級則采用軟件控制其放大倍數的方式,通過三個增益控制管腳MGS1、MGS2、MGS3分別與DSP的PF4、PF5、PF6相連,利用軟件來控制PF4、PF5、PF6,從而使這兩級放大器可以實現8個不同的放大倍數。考慮到放大器實際增益的損耗,文中該系統選用其中的第一級、第二級和第四級,而第三級懸空,這樣的放大倍數(25 dB+40 dB+40 dB=105 dB)可充分滿足系統要求。另外,因為輸入中頻信號幅度太小,很容易被淹沒在噪聲中,因此,放大器每級之間都應加入濾波電路,以保證信號的準確性。
本系統采用的A/D、D/A轉換芯片,均為12位高速芯片,可保證系統的實時性和精度。
該系統的數據處理選用Blackfin533,處理器內核包括2個16位乘法器,2個40位的累加器,2個40位的ALU,4個視頻ALU和1個40位移位器。處理器內核時鐘最高可達600 MHz,片上存儲容量為148 kB。本系統采用10 M的晶振,可將內核時鐘倍頻至400 MHz,其系統時鐘為100 MHz。
系統中ADSP-BF533所使用的資源包括2個定時器、DMA控制器、PPI端口和PF端口。系統初始化后,ADSP-BF533首先設置PLL、倍頻輸入時鐘、產生內核時鐘和系統外設時鐘。然后初始化內部總線和各個需要的端口,其中定時器TIMER0為D/A轉換芯片AD9762提供工作時鐘,定時器TIMER1為A/D轉換芯片AD9223提供工作時鐘。
ADSP-BF533處理器可實現以下功能:
(1)中頻信號放大:通過PF4、PF5、PF6端口來控制AD2613第二級和第四級的放大倍數。
(2)收發時間控制:產生收發開關控制信號,其寬度為3 ms,重復周期為80~120 ms隨機變化;
(3)調制信號產生:通過PPI端口產生三角調制信號,并將其放大到特定幅度及偏置然后做為脈內調制信號傳送給天線。
(4)測高處理:完成調頻信號差頻信號的頻譜分析、雜波抑制和輸出測高指示信號。
兩片AD746為運算放大器,一片用來將D/A產生的三角波放大至7 V,一片用來將預報警開關信號放大至9 V。
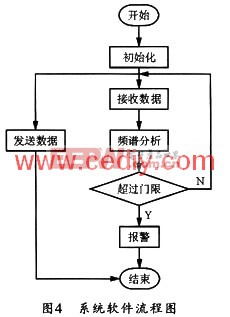
4系統軟件設計
本系統DSP軟件使用C語言編寫,采用3個中斷來完成系統功能。系統初始化后,由PF2端口響應系統發出的收發控制信號,觸發PF2中斷,在PF2的中斷服務程序EX_INTERRUPT_HAN-DLER(PF2_Isr)中使能PPI端口發數,并使能DMA控制3 ms發數時間。其中PPI所發的數是由MATLAB產生兩個周期的三角波數據,并歸一化使之成為0-4096之間的無符號整數,然后放人提前聲明的緩存sPPI_TxBuffer中。一旦DSP接收到了數據就觸發TIMER1中斷,在TIMER1的中斷服務程序EX_INTERRUPT_HANDLER(TIMER1_Isr)中將所接收到的數據寫入TIMER1_RxBuffer1,當接收滿1024個點時,就觸發軟中斷,然后在軟中斷的中斷服務程序EX_INTERRUFT_HANDLER(FFT_Isr對該1024個點的數據進行FFT運算,估計其頻譜,最后由頻譜估算出距離。若測算出的距離小于200 m,則將PF3至高,信號再經放大后,可作為輸出預報警開關電平。圖4所示是發送連續波時的DSP軟件流程圖。
 本文引用地址:http://www.104case.com/article/188435.htm
本文引用地址:http://www.104case.com/article/188435.htm
5 結束語
本系統以處理器ADSP-BF533為中心,結合外部電源轉換芯片、放大器芯片、A/D、DSP、驅動及放大器等外圍電路,來實現調頻法測距用以跟蹤空中炮彈的飛行軌跡,同時可完成對地面的預報警功能。本系統的測試數據及報告分析準確,測試精度達±15 m,可應用于實際測繪。




評論