基于ADSP-BF533的高度跟蹤系統

調頻法測距可用于連續波雷達,也可用于脈沖雷達。該高度跟蹤系統以ADSP-BF533為核心,結合調頻法測距,來完成跟蹤空中炮彈飛行軌跡的任務,同時可實現對地面的預報警功能。
1調頻測距法
調頻測距系統中的發射頻率一般按周期性三角波的規律變化,如圖1所示。圖中,f1是發射機的高頻發射頻率,ft0是它的平均頻率,Tm是ft0變化的周期,fr從目標反射回來的回波頻率,它和發射頻率的變化規律相同,但在時間上滯后tR(tR=2R/c)。其中R為目標到發射機的距離,c為光速。發射頻率調制的最大頻偏為±△f,fb為發射和接收信號間的差拍頻率,差拍的平均值用fbav表示。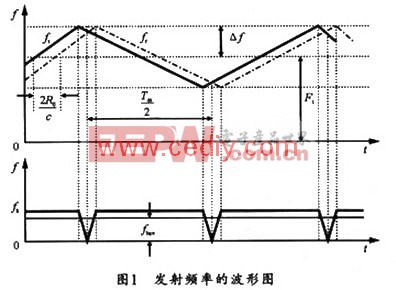
如將圖1中的發射頻率ft和回波頻fr寫成以下表達式:
上式中的△f、Tm均為已知,因此,本系統只需提取中頻差拍信號頻率fbav,便可估算出炮彈離地面的距離。
2系統功能簡介
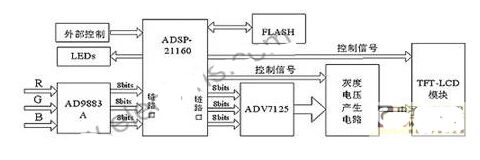
高度跟蹤系統是由射頻天線和中頻控制板兩部分組成。本文主要介紹中頻控制板部分,其數字化信號處理原理圖如圖2所示。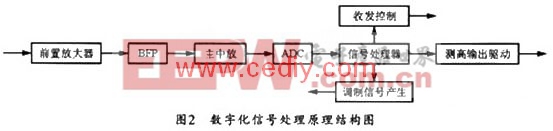
該系統安裝在運行炮彈上面,先是接收外部收發控制脈沖觸發的發送三角波,然后經信號處理器處理為脈內調制信號,再通過射頻模塊將所接收的中頻差拍信號進行放大、采樣、提取頻率,最后估算出距離,若該距離超過門限值,則輸出報警信號,以實現系統的自動報警功能。
3系統硬件設計
該系統中的頻控制板部分主要包括電源轉換芯片TPS5430和TPS70302、放大器芯片AD2613和兩片AD746、A/D轉換芯片AD9223、DSP芯片ADSP-BF533、D/A轉換芯片AD9762、以及兩片驅動芯片74ACT11244。其電路連接如圖3所示。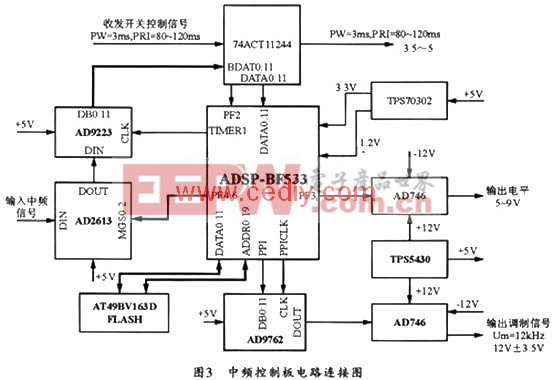




評論