基于DM642的橋梁纜索表面缺陷圖像采集及傳輸系統(tǒng)設

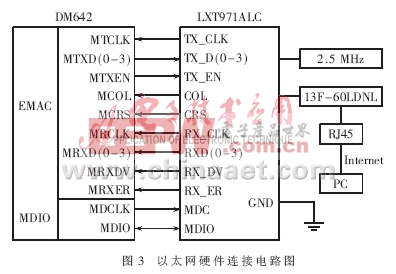
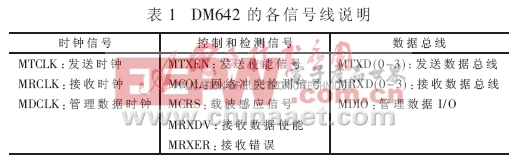
EMAC提供了數(shù)據(jù)鏈路層的功能[7],所以只需要利用一塊物理層的網(wǎng)絡芯片――以太網(wǎng)PHY收發(fā)器LXT971ALC轉(zhuǎn)換信號,經(jīng)網(wǎng)絡變壓器與Internet相連,從而把采集到的圖像數(shù)據(jù)發(fā)送到地面服務器(PC),硬件連接電路圖如圖3。其中:DM642的各信號線與PHY網(wǎng)絡收發(fā)器芯片LXT971ALC的對應信號線直接連接,輸出數(shù)據(jù)經(jīng)網(wǎng)絡變壓器13F-60LDNL以及RJ45接口連接到Internet上,從而發(fā)送到PC機。圖3中DM642的各信號線說明如表1。本文引用地址:http://www.104case.com/article/188271.htm
2 系統(tǒng)軟件設計
2.1 系統(tǒng)主程序設計
本系統(tǒng)的軟件是在TI公司提供的集成開發(fā)環(huán)境CCS下開發(fā)的。通過XDS510 USB2.0仿真器,將在PC上CCS環(huán)境下編寫、調(diào)試完成的程序燒入DM642的FLASH中,便可以在DM642上電后自動運行執(zhí)行程序,實現(xiàn)圖像的采集、處理與傳輸,達到缺陷檢測的目的。
本系統(tǒng)的主程序完成各種寄存器的初始化工作、實時采集并存儲攝像機傳送來的視頻圖像,經(jīng)過DM642的壓縮編碼,通過網(wǎng)口發(fā)送采集的圖像數(shù)據(jù),通知CPLD繼續(xù)下一次采集直至檢測結(jié)束。軟件設計流程如圖4所示。
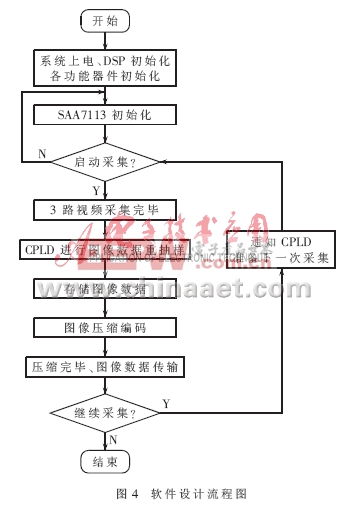
具體工作過程為:上電后系統(tǒng)程序自動從FLASH裝載到DSP的片內(nèi)RAM中,裝載完畢,DM642自動調(diào)用程序RAM中的代碼執(zhí)行。首先通過I2C總線對A/D芯片SAA7113的工作參數(shù)進行設置,在圖像采集控制電路(由CPLD實現(xiàn))的作用下,SAA7113按設定的工作參數(shù)獲取圖像(本系統(tǒng)設定的數(shù)據(jù)輸出流為BT656格式即:Y:U:V 4:2:2),地址譯碼電路(由CPLD實現(xiàn))將數(shù)字圖像數(shù)據(jù)重新抽樣后存儲在片外數(shù)據(jù)存儲器SDRAM中,經(jīng)DM642實時壓縮處理后,通過網(wǎng)絡芯片接口,TCP/IP協(xié)議傳輸?shù)降孛娴姆掌鳎≒C機)。PC機收到圖像信號后進行圖像解碼,在屏幕上顯示并將其保存以供后續(xù)的圖像處理使用。不斷重復上述操作,直至檢測完成,便可實現(xiàn)圖像的實時采集與傳輸。
2.2 圖像壓縮算法設計
視頻圖像只有通過壓縮后才能正確地通過網(wǎng)絡傳輸。本系統(tǒng)的圖像壓縮采用H.263數(shù)字圖像壓縮算法,由信號處理器DM642來完成。H.263壓縮以幀內(nèi)變換與幀間預測相結(jié)合的混合編碼技術(shù)為核心,適合視頻流的實時網(wǎng)絡化傳輸,比H.264算法成熟、穩(wěn)定,且實現(xiàn)簡單。
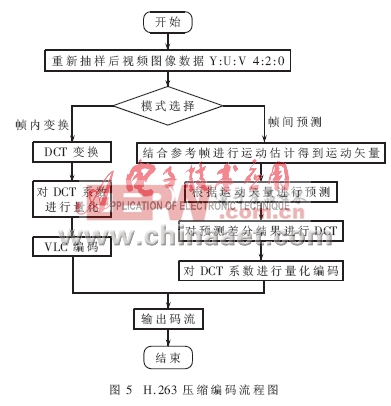
由于H.263壓縮標準只需要CIF格式(Y:U:V 4∶2∶0)的視頻圖像,故需將數(shù)字化的720×576 4∶2∶2的圖像抽樣為352×288 4∶2∶0的視頻圖像,再寫入SDRAM中。此工作由CPLD完成。重新抽樣完成后,再由DM642讀取SDRAM中的數(shù)據(jù)進行壓縮編碼,輸出的視頻碼流經(jīng)網(wǎng)口傳輸?shù)絇C上。
本系統(tǒng)H.263壓縮編碼設計流程有:編碼參數(shù)設置,視頻數(shù)據(jù)輸入,幀內(nèi)編碼,幀間編碼,熵編碼和碼流輸出。編碼流程圖如圖5所示。
3 系統(tǒng)測試及試驗結(jié)果
將檢測裝置裝在纜索機器人上,用交叉網(wǎng)線連接DM642以太網(wǎng)口與地面服務器(PC機),硬件連接完畢后,準備測試。系統(tǒng)上電,隨著纜索機器人的爬升,3路CCD進行圖像采集,經(jīng)DM642的壓縮處理后通過Internet傳輸?shù)絇C機上。PC機接收到圖像信號后,進行圖像解碼,并在屏幕上顯示,完成一次圖像的壓縮與解壓縮過程。繼續(xù)采集下一次,直至完成檢測。
網(wǎng)絡上的用戶也可以直接在遠端用IE瀏覽器觀看Web服務器上的攝像機圖像,實現(xiàn)對遠程圖像的實時監(jiān)控。
經(jīng)試驗證明,本文介紹的基于DM642的纜索缺陷圖像采集及傳輸系統(tǒng)可以很好地完成纜索表面圖像的采集和網(wǎng)絡化傳輸功能,并在PC機上顯示,以供圖像處理,達到了預期的目標。該系統(tǒng)具有一定的通用性和擴展性,可用作串口、HPI接口、無線傳輸?shù)榷喾N傳輸方式的擴展,同時也可用作其他目標對象的缺陷檢測。


評論