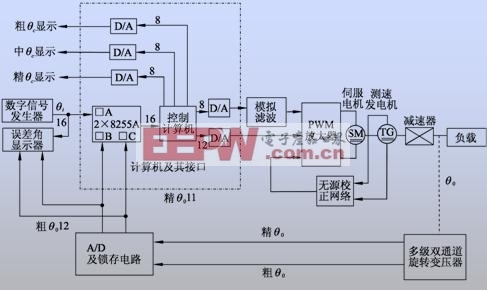
方位雙穩定轉臺伺服系統的設計與實現

3 轉臺
雙轉臺是安裝于某工程動載體上的機電設備,轉臺采用高精度齒輪驅動,為控制轉臺的重量及滿足動載體設備的環境要求,選用鋁合金材料柔性加工,齒輪及軸采用合金鋼,軸承采用高精度圓錐滾子軸承及球軸承,以便于提高轉臺剛度和機械性能。
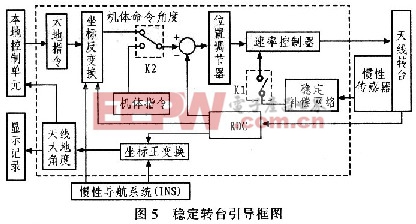
4 穩定轉臺引導原理
穩定轉臺引導原理圖如圖5所示,它利用慣性導航系統(INS)給出動載體所在的地理經度、緯度,動載體姿態參數(動載體相對正北方向的航向角k、動載體相對水平面的橫滾角φ、動載體相對水平面的俯仰角θ),再根據上位機的位置指令,通過控制計算機計算兩個轉臺的方位角,進行引導,使轉臺實時隨動于上位機指令。本文引用地址:http://www.104case.com/article/187819.htm
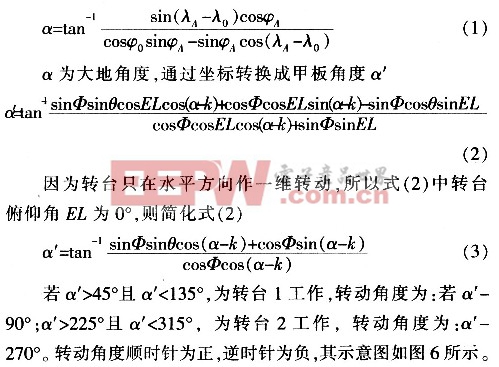
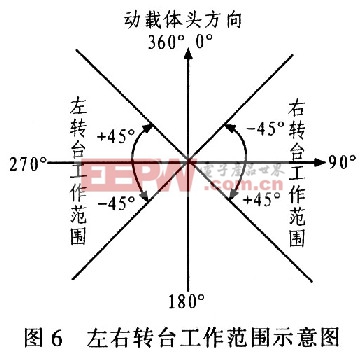
根據本地控制單元的命令和動載體上的INS測出的動載體位置經緯度和動載體姿態,可以計算出轉臺對目標跟蹤的機體角度,假設動載體經度為λ0,緯度為φ0;目標點經度為λA,緯度為φA;則兩點的方位角α
5 結束語
該項目伺服系統已成功應用,經過環境鑒定試驗、可靠性鑒定試驗、整機電磁兼容試驗、科研試飛驗證,滿足各項指標要求,為后續項目進一步發展奠定堅實基礎。

伺服電機相關文章:伺服電機工作原理


評論