方位雙穩(wěn)定轉(zhuǎn)臺伺服系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)

這里提出一種方位雙穩(wěn)定轉(zhuǎn)臺伺服系統(tǒng)設(shè)計(jì)和工程實(shí)現(xiàn)方法。其主要工作原理是利用慣性導(dǎo)航INS(Inertial Navigation System)信息和程序引導(dǎo)技術(shù),實(shí)時(shí)調(diào)整轉(zhuǎn)臺方位指向目標(biāo)的大地角度,實(shí)現(xiàn)對預(yù)定目標(biāo)的實(shí)時(shí)、快速、準(zhǔn)確指向,對于載體的擾動(dòng)干擾利用捷聯(lián)慣性傳感器,在轉(zhuǎn)臺上實(shí)現(xiàn)一級穩(wěn)定方法來隔離,從而達(dá)到轉(zhuǎn)臺對目標(biāo)的穩(wěn)定指向。
1 伺服系統(tǒng)組成
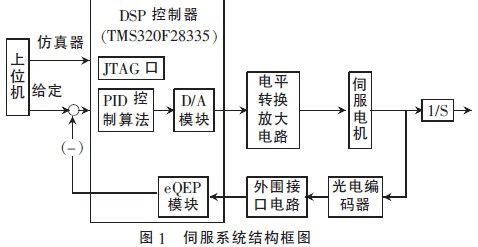
伺服系統(tǒng)設(shè)備包括轉(zhuǎn)臺控制器、方位轉(zhuǎn)臺、伺服電機(jī)、減速機(jī)構(gòu)、角度傳感器、慣性傳感器、安全機(jī)構(gòu)等。組成框圖如圖1所示。由一臺轉(zhuǎn)臺控制器控制兩套方位轉(zhuǎn)臺,在水平方向上做一維穩(wěn)定運(yùn)轉(zhuǎn)。
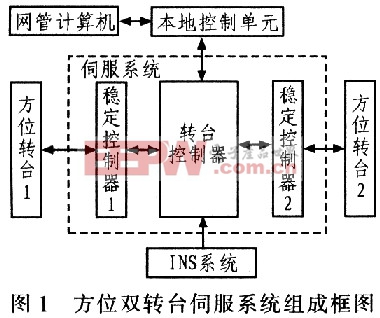
該伺服系統(tǒng)具有如下設(shè)計(jì)特點(diǎn):1)采用以INS平臺數(shù)據(jù)引導(dǎo)的程序跟蹤體制,保證了跟蹤的準(zhǔn)確性和快速性:2)采用捷聯(lián)速率陀螺傳感器,用以隔離載體姿態(tài)變化對方位轉(zhuǎn)臺指向的影響,使轉(zhuǎn)臺具有抗載體擾動(dòng)的能力。
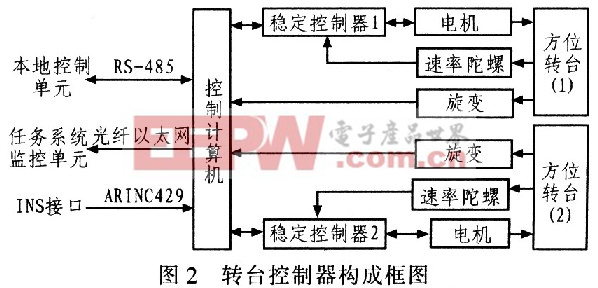
2 轉(zhuǎn)臺控制器
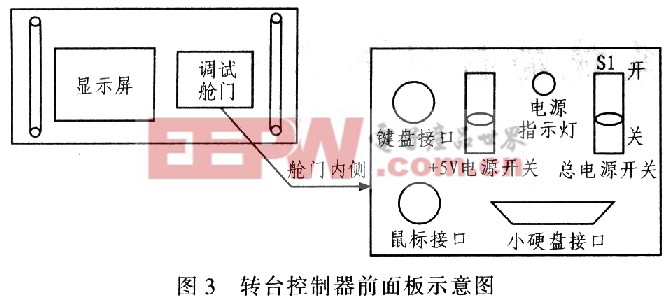
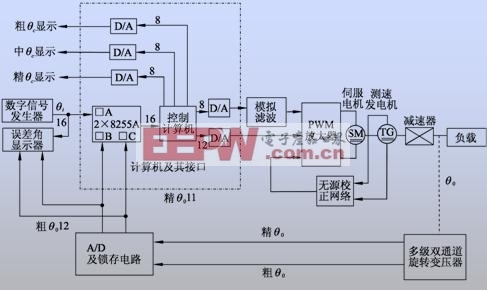
轉(zhuǎn)臺控制器包括控制計(jì)算機(jī)、驅(qū)動(dòng)功放、電機(jī)、角位置傳感器、速率陀螺等,其構(gòu)成框圖如圖2所示。控制計(jì)算機(jī)用來控制2個(gè)轉(zhuǎn)臺方位實(shí)時(shí)指向預(yù)定位置。而轉(zhuǎn)臺控制器為1個(gè)19英寸4U高的標(biāo)準(zhǔn)抽屜,前面板如圖3所示。
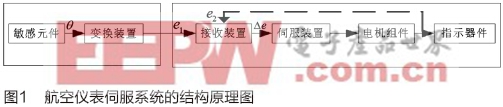
轉(zhuǎn)臺控制計(jì)算機(jī)硬件由PC-104板卡組成,主要包括主板(帶CPU模塊)、AD/DA、I/0板、串口通信板、ARINC429接口板、編碼板、激磁板等。由于PC-104板卡之間采用“針”和“孔”層疊形式連接,接合緊密、結(jié)構(gòu)緊湊、體積小巧,具有極好的抗振性,適用于環(huán)境惡劣的機(jī)載設(shè)備。經(jīng)過加固后的PC-104計(jì)算機(jī)如圖4所示。


伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理


評論