伺服系統(tǒng)的線性補償與伺服系統(tǒng)的測速測角

在伺服系統(tǒng)中常用具有線性特性的補償裝置(通常是補償電路),采取串聯(lián)、順饋(或稱并聯(lián))、負(fù)反饋、正反饋,以及它們的組合形式,來改善系統(tǒng)的特性,提高系統(tǒng)的工作品質(zhì)。下面分別介紹各種補償聯(lián)接形式的特點及有關(guān)注意事項。
本文引用地址:http://www.104case.com/article/201710/367375.htm伺服系統(tǒng)的常用線性補償
1.串聯(lián)補償
串聯(lián)補償是指在系統(tǒng)主通道(即前向通道)中串接人適當(dāng)?shù)难a償裝置(電路)。如圖所示。
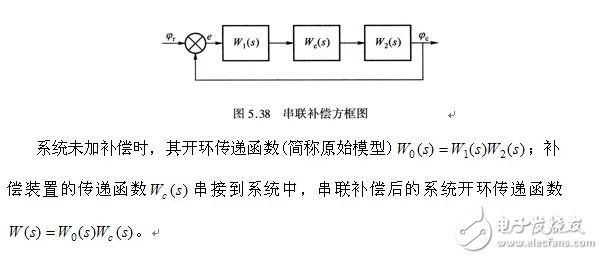
常用的串聯(lián)補償裝置均由電路組成,有僅用R、L、C組成的無源補償網(wǎng)絡(luò)。有利用線性集成放大器組成的有源補償網(wǎng)絡(luò),它們所能傳遞的都是直流信號,因此只有串聯(lián)在系統(tǒng)線路中傳遞直流信號的部位,才能起到相應(yīng)的作用。如果系統(tǒng)中傳遞的是固定頻率的交流載頻信號,則無法使用以上兩類補償網(wǎng)絡(luò)。
常用的補償網(wǎng)絡(luò),在工程上實用的還有許多形式。作為系統(tǒng)的串聯(lián)補償,它們中的一些是不能用的,因為在系統(tǒng)的主通道中,不能串聯(lián)含有純微分環(huán)節(jié)的電路(即不串聯(lián)含有s=0的零點的網(wǎng)絡(luò)),它將阻斷恒定信號的有效傳遞,使伺服系統(tǒng)不能有效地工作。
為了提高系統(tǒng)的穩(wěn)態(tài)精度,常采取提高系統(tǒng)的型(即無差度)的辦法,這就要求在系統(tǒng)的前向主通道中串入積分環(huán)節(jié),或者串聯(lián)PI調(diào)節(jié)器。
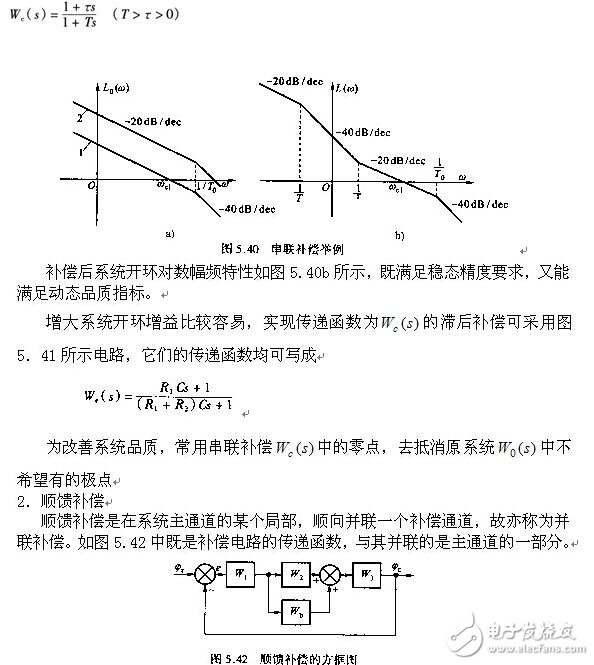
倘若系統(tǒng)開環(huán)對數(shù)幅頻特性(系統(tǒng)是最小相位系統(tǒng))如圖5.40a中曲線1所示。在零初始條件下,系統(tǒng)對輸入階躍信號的響應(yīng)能滿足動態(tài)品質(zhì)要求,但系統(tǒng)的穩(wěn)態(tài)精度不高;為提高系統(tǒng)穩(wěn)態(tài)精度需增大系統(tǒng)開環(huán)增益,系統(tǒng)開環(huán)對數(shù)幅頻特性如圖a中曲線2所示,但此時系統(tǒng)的動態(tài)品質(zhì)不滿足要求。在增大系統(tǒng)開環(huán)增益的同時,串接一個滯后補償
伺服系統(tǒng)的測速與測角(位移)
影響伺服系統(tǒng)控制因素很多,其中最重要的是位置、速度、加速度以及振動等伺服。系統(tǒng)的控制精度是最重要的技術(shù)指標(biāo)之一,伺服系統(tǒng)的控制精度,受多方面因素的影響,其中十分關(guān)鍵的是檢測裝置的精度(分辨率)。現(xiàn)代科學(xué)技術(shù)的發(fā)展,對高精度伺服系統(tǒng)的運用越來越多。例如高精度鎖相調(diào)速系統(tǒng),要求測速誤差《i0~,而一般測速發(fā)電機測速誤差卻在2%。0.02%范圍。用于跟蹤衛(wèi)星的雷達天線伺服系統(tǒng),它的跟蹤誤差必須《1’。
觀測天體的射電望遠鏡,要求伺服系統(tǒng)的誤差《0.05’。開始進入家庭的電視激光放像機,激光針頭的徑向運動要伺服系統(tǒng)來控制,該系統(tǒng)的位置誤差≤1胛。以上幾例均說明伺服系統(tǒng)的精度是較高的,而它們所采用的檢測裝置的精度將更高。首先,系統(tǒng)中的檢測裝置對誤差能分辨,并提供有效的信號,然后才談得上對系統(tǒng)進行控制。因此,檢測裝置的高精度,是實現(xiàn)高精度伺服系統(tǒng)的前提。然而,各種用途的伺服系統(tǒng)是多種多樣的,它們對精度的要求也很不一致,正因為如此,在伺服系統(tǒng)中采用的檢測裝置其類型十分繁雜,本節(jié)只就常見的模擬式測速和測角(位移)裝置,做一簡要說明。
1.角速度的檢測
在速度伺服系統(tǒng)中,系統(tǒng)的輸出端必須有檢測角速度的裝置,在位置伺服系統(tǒng)中,也常需要它獲得速度阻尼信號。因此在伺服系統(tǒng)中被廣泛采用。用得最多的是各種測速發(fā)電機,比較簡易的有測速電橋,比較精確的是增量碼盤。
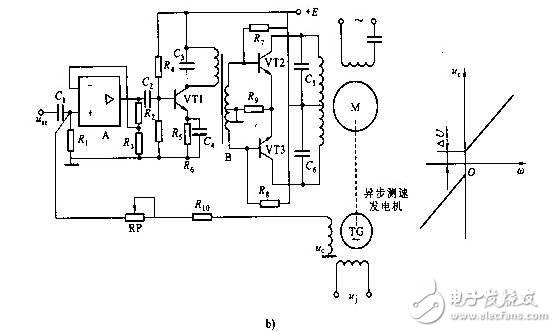
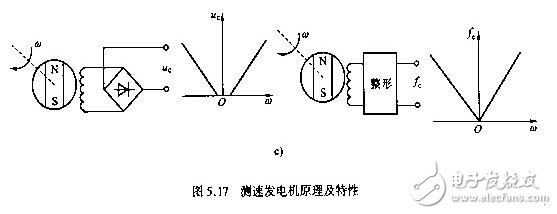
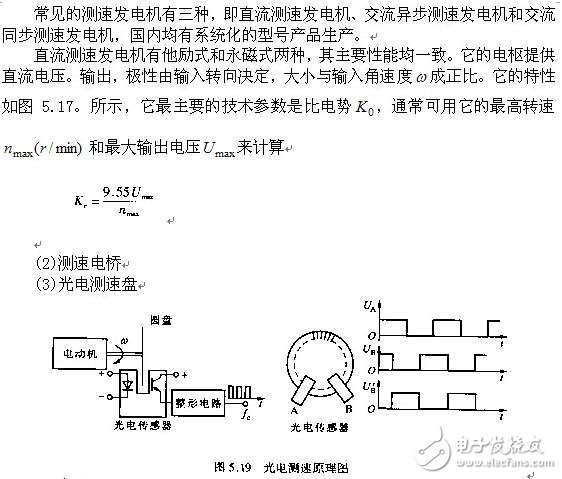
(1)測速發(fā)電機



評論