智能救援機器人的設計

1.2.3 超聲波測距電路
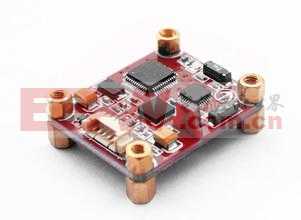
由于超聲波執行性強、能量消耗慢、在介質中傳播距離較遠的特點。我們采用DIP-ME007超聲波測距模塊完成高度的測量功能,其電路板如圖4所示。DIP-ME007超聲波測距模塊能比較迅速、方便地測出橋底部距測距模塊之間的距離,此模塊共有五個引腳VCC、tring、echo、out、GND。DIP-ME007超聲波測距模塊輸出為pwm方式,VCC、GND接好后向tring發一個10 s以上的高電平,就可以在接收口echo等待高電平輸出。單片機采用跳變沿觸發,觸發后即開始計時。當電平變低后即開始讀定時器,此時的值即為此次測距所用的時間。根據S=Ct/2即可得出所測得的距離。如此周期性測量即可實現移動測距。單片機內部自動將測得數據保存并與上一次測距結果比較,保留最大值,當連續五次未測得大于前一次的數據時停止檢測并記錄最大值。當再次檢測到黑線即已成功過橋,是時單片機控制顯示模塊將測得的最大值在液晶屏上顯示出來。
1.3 控制器電路
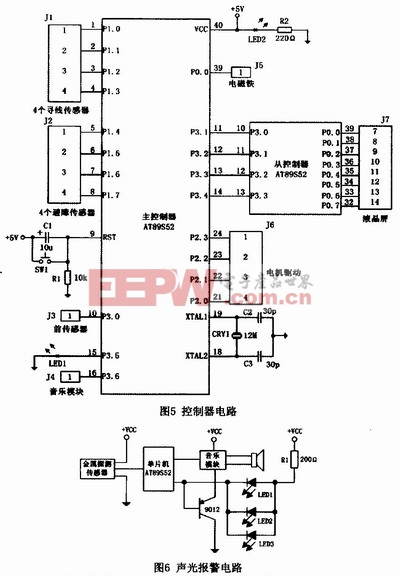
由于主控制器的任務較多,電路要求引腳較多,且顯示器的控制程序較為復雜,我們單獨配備了一個同樣的單片機作為主控制器的輔助部分,通過它來分擔主控制器的工作,來完成顯示部分的工作。其中主控制器與其它模塊的連接如圖5所示。
1.4 聲光報警電路
聲光報警模塊主要應用于搜救報警電路中,同時為進一步擴展應用,我們在控制其開關的同時引入另一條信號線實現了對聲音的控制。在搜救過程和平安到達安置區時經采用不同頻率和音色的聲音給出表示。尋找硬幣我們采用金屬探測傳感器,當發現金屬時,其信號線上電平從低電平變為高電平,觸發單片機中斷,在單片機的控制下機器人停止運動,啟動音樂發生模塊并點亮LED進行聲光報警,具體實現電路如圖6所示。


評論