電磁式操縱負(fù)荷系統(tǒng)的設(shè)計與實現(xiàn)

2.3 系統(tǒng)軟件實現(xiàn)
電磁式操縱負(fù)荷系統(tǒng)的軟件用Visual C++6.0編寫,主要由初始化模塊、模型負(fù)載力計算模塊和故障處理模塊組成。
系統(tǒng)軟件的主要任務(wù)是依據(jù)縱向負(fù)載力的數(shù)學(xué)模型,實時計算縱向模型負(fù)載力。首先實時地從主控計算機和位移傳感器、速度傳感器中接收當(dāng)前迎角或側(cè)滑角、馬赫數(shù)、升降舵襟翼角及升降舵偏角、升降舵調(diào)整片偏角、縱向角加速度、縱向過載、駕駛桿位移、駕駛桿移動速度及其他與負(fù)載力有關(guān)的參數(shù),在預(yù)先給定的二維插值函數(shù)表內(nèi)插值和計算得到當(dāng)前時刻的鉸鏈力矩導(dǎo)數(shù),計算出當(dāng)前時刻的鉸鏈力矩及氣動力,然后計算當(dāng)前的其他負(fù)載力,最后計算總的模型負(fù)載力。
3 試驗驗證
試驗的目的是找出操縱負(fù)荷系統(tǒng)中的力、位移、電壓之間的關(guān)系,得出三者之間的關(guān)系曲線,驗證電磁式操縱負(fù)荷系統(tǒng)的性能。
實驗設(shè)備主要有:電磁式操縱負(fù)荷系統(tǒng)、示波器、卷尺(精確到0.1 mm)、鋼尺(精確到0.5 mm)、膠帶、剪刀和標(biāo)記筆等。
因為推桿和拉桿是可逆的過程,所以實驗只考慮其中之一,以拉桿為例,假設(shè)其產(chǎn)生的操縱負(fù)荷的力為正。
由于操縱機構(gòu)的上下桿長度之比為8:1,所以桿位移量為磁鐵位移量的8倍。在電壓為3 V,6 V,10 V這三種情況下,改變位移的大小,記錄力隨位移的變化曲線,如圖5所示。本文引用地址:http://www.104case.com/article/187442.htm
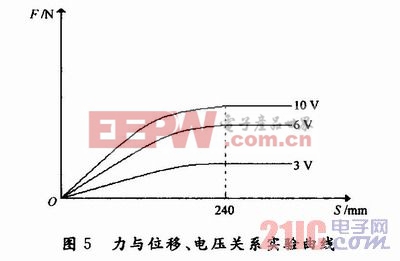
由圖5可以看出,電磁操縱負(fù)荷系統(tǒng)的力、位移、電壓關(guān)系實驗曲與圖1所示的某型教練機桿力桿位移曲線基本吻合,同時還得出結(jié)論:鐵芯長度+磁鐵長度=最大行程/2;力是位移與電流的函數(shù);線圈最大寬度小于最大行程。
4 結(jié)語
利用電磁作動筒作為飛行模擬器操縱負(fù)荷仿真系統(tǒng)的力伺服系統(tǒng),構(gòu)成了飛機縱向操縱負(fù)荷仿真系統(tǒng),現(xiàn)在已經(jīng)成功應(yīng)用于某型教練機飛行模擬器的縱向操縱負(fù)荷仿真系統(tǒng)中。通過近幾年的模擬訓(xùn)練證明,該方法仿真精度高,響應(yīng)速度快,負(fù)載力模型和參數(shù)易于修改,可適
應(yīng)不同仿真對象和不同工作模式負(fù)載力特性變化的要求,可推廣應(yīng)用于多種類型的飛行模擬器的操縱系統(tǒng)中。該方法還可用于橫向操縱負(fù)載力及腳蹬力的仿真。









評論