無人駕駛車輛終端控制的研究

本系統(tǒng)由于使用ARM7,ARM7是小型、快速、低能耗、集成式RISC內(nèi)核,用于移動通信ARM7系列處理器是英國ARM公司設(shè)計的主流嵌入式處理器 做主要控制器,考慮到資源的利用,采用μC/OS-Ⅱ來作為操作系統(tǒng)。μC/OS-Ⅱ是一個完整的、可移植、可固化、可剪裁的占先式實時多任務(wù)內(nèi)核。他用ANSI C語言編寫,包含一小部分匯編代碼,使之可以供不同架構(gòu)的微處理器使用。μC/OS-Ⅱ可以管理64個任務(wù),具有信號量、互斥信號量、事件標(biāo)志組、消息郵箱、消息隊列、任務(wù)管理、時間管理和內(nèi)存塊管理等功能。
μC/OS-Ⅱ軟件體系結(jié)構(gòu)有3部分:
(1)μC/OS-Ⅱ核心代碼:包括10個C程序文件和1個頭文件,主要實現(xiàn)系統(tǒng)調(diào)度、任務(wù)管理、內(nèi)存管理、信號量、消息郵箱和消息隊列等系統(tǒng)功能。此部分與處理器性能無關(guān)。
(2)μC/OS-Ⅱ配置代碼:包括兩個頭文件,用于裁減和配置μC/OS-Ⅱ。該部分與用戶實際應(yīng)用相關(guān)。
(3)μC/OS-Ⅱ移植代碼:包括1個匯編文件、1個C程序文件和1個頭文件,這是移植μC/OS-Ⅱ所需要的代碼,與處理器無關(guān)。
在本系統(tǒng)中首先要進行系統(tǒng)移植,才能進行程序的調(diào)用。移植滿足了以下要求:
(1)處理器的C編譯器能產(chǎn)生可重入型代碼;
(2)處理器支持中斷,并且能產(chǎn)生定時中斷(10~100 Hz);
(3)用C語言可以開/關(guān)中斷;
(4)處理器能支持一定數(shù)量的數(shù)據(jù)存儲硬件堆棧(可能是幾kB);
(5)處理器有將堆棧指針以及其他CPU寄存器的內(nèi)容讀出并保存到堆棧或者內(nèi)存中去的指令。
本系統(tǒng)軟件程序主要分為3個部分:輸入部分、控制部分和輸出部分。下面分別進行介紹。
輸入設(shè)備主要包括鍵盤、射頻識別讀卡器,以及構(gòu)成輸入設(shè)備的接收系統(tǒng):GPS/GIS接收器和GPRS模塊等。在車輛的行駛過程中,射頻識別模塊負責(zé)正確接收路況信息,鍵盤負責(zé)等待用戶接收車上用戶指令,GPRS模塊負責(zé)接收遠程工作站的數(shù)據(jù)信息,該模塊在啟動后主要是負責(zé)與工作站取得聯(lián)系,進行信息交流,并且不斷更新系統(tǒng)內(nèi)部分路徑信息,方便車輛能夠及時轉(zhuǎn)向。GPS和GIS模塊則主要負責(zé)使系統(tǒng)能夠接收到車輛目前的準(zhǔn)確位置。
輸出設(shè)備主要包括顯示屏等,通過顯示屏獲取車輛所在位置和路況信息等。他的主要作用在于根據(jù)要求輸出相應(yīng)的高低電平來提供轉(zhuǎn)向所需要的電壓。實現(xiàn)原理是通過從標(biāo)簽獲得數(shù)據(jù)信息使得系統(tǒng)產(chǎn)生高低電平,同時,系統(tǒng)必須將GPS模塊和GPRS模塊提供的數(shù)據(jù)通過人機界面顯示在屏幕上使得用戶能夠?qū)崟r地看到車輛的信息,包括前方路況、車輛位置等。
控制部分是本系統(tǒng)的關(guān)鍵,流程圖見圖3。
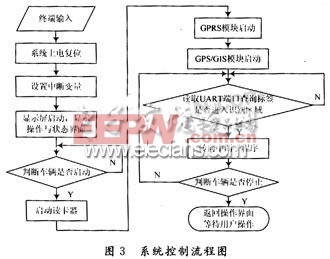
控制部分的流程是這樣的:首先將操作系統(tǒng)下載到目標(biāo)板,目標(biāo)板初始化,并且設(shè)置各個模塊的中斷向量來保證各個模塊啟動后能夠正確運行。中斷優(yōu)先級的排序是讀卡器優(yōu)先級最高,其次是GPRS,最后是GPS。同時,顯示屏顯示操作界面,用戶可以輸入指令使得汽車啟動。當(dāng)車輛啟動后,各模塊也隨之運行,系統(tǒng)程序?qū)⑥D(zhuǎn)入查詢狀態(tài),通過不斷掃描UART端口判斷是否有標(biāo)簽進入識別區(qū)域。若進入標(biāo)簽識別區(qū)域,讀卡器就會接收到射頻模塊識別到的條碼信號,判斷信號正確后,系統(tǒng)轉(zhuǎn)人中斷子程序。在中斷子程序中,系統(tǒng)會向GPIO端口提供相應(yīng)的高低電平作為輸出信號來實現(xiàn)轉(zhuǎn)向。GPRS是隨著車輛啟動后就立即啟動的,這是因為他必須不斷更新監(jiān)控中心提供的路徑信息來保證車輛的正常行駛。當(dāng)車輛停止時會發(fā)出電平信號,此時,系統(tǒng)轉(zhuǎn)入等待狀態(tài),屏幕顯示操作界面,等待用戶進行下一步操作。
4 結(jié)束語
本方案經(jīng)過測試仿真表明,自主轉(zhuǎn)向懸掛式獨軌車載在距離標(biāo)簽10 m內(nèi)能夠以915 MHz的頻率通過射頻模塊識別到前方軌道信息,而且能以115.2 kB/s的波特率與GPRS連接,然后接入GPRS網(wǎng)絡(luò)與遠端網(wǎng)絡(luò)監(jiān)控站實時通信,進行數(shù)據(jù)交換。同時,系統(tǒng)能夠作出判斷,發(fā)出控制信號。根據(jù)測試,該系統(tǒng)穩(wěn)定性高,實時性強,如果能應(yīng)用到實際中,使用戶和工作站能夠了解車輛的工作狀態(tài),對減少交通事故有很大的意義。
近年來,不少國家在開發(fā)無人駕駛汽車技術(shù)。這樣的汽車并非科幻電影中的道具,英國已經(jīng)準(zhǔn)備2010年就在部分機場投放這種無人罵駛汽車。在不久的將來,英國政府將修建專門的無人駕駛汽車公路:或者在一般公路上開辟無人駕駛汽車快速通道。有關(guān)專家表示,在解決城市交通問題上,無人駕駛汽車因不用司機而成本更低,而且這些汽車采用電力驅(qū)動,更加環(huán)保。無人駕駛汽車可和城市交通指揮中心聯(lián)網(wǎng),選擇最好的路線,有效避免塞車。


評論