計數(shù)器原理分析及應(yīng)用實(shí)例

本文引用地址:http://www.104case.com/article/186305.htm
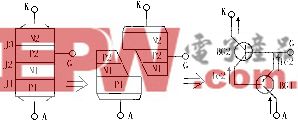
圖5.3.36 圖5.3.34電路的改進(jìn)
兩個與非門構(gòu)成了RS鎖存器,以它的![]() 端輸出的低電平作為74LS160的異步復(fù)位信號。若74LS160從0000狀態(tài)開始計數(shù),則第六個時鐘脈沖上升沿到達(dá)時進(jìn)入0110狀態(tài),使RS鎖存器置位,
端輸出的低電平作為74LS160的異步復(fù)位信號。若74LS160從0000狀態(tài)開始計數(shù),則第六個時鐘脈沖上升沿到達(dá)時進(jìn)入0110狀態(tài),使RS鎖存器置位,![]() 端輸出低電平。74LS160在0110狀態(tài)作短暫停留后,迅速轉(zhuǎn)入其它狀態(tài),如0010或0100,譯碼器輸出的負(fù)脈沖消失。如果我們把這個窄脈沖直接作為74LS160的異步復(fù)位信號,計數(shù)器不一定能夠可靠地工作。如果我們把這個窄脈沖作為RS鎖存器的置位信號,把時鐘脈沖作為RS鎖存器的復(fù)位信號,再將RS鎖存器的
端輸出低電平。74LS160在0110狀態(tài)作短暫停留后,迅速轉(zhuǎn)入其它狀態(tài),如0010或0100,譯碼器輸出的負(fù)脈沖消失。如果我們把這個窄脈沖直接作為74LS160的異步復(fù)位信號,計數(shù)器不一定能夠可靠地工作。如果我們把這個窄脈沖作為RS鎖存器的置位信號,把時鐘脈沖作為RS鎖存器的復(fù)位信號,再將RS鎖存器的![]() 作為74LS160的異步復(fù)位信號,計數(shù)器一定能夠可靠地工作,因?yàn)?img onload="if(this.width>620)this.width=620;" onclick="window.open(this.src)" style="cursor:pointer" height="25" src="http://editerupload.eepw.com.cn/fetch/20131113/186305_2_1.jpg" width="16" style="zoom: 1" alt="" />輸出的負(fù)脈沖的寬度與時鐘脈沖高電平的持續(xù)時間相等。
作為74LS160的異步復(fù)位信號,計數(shù)器一定能夠可靠地工作,因?yàn)?img onload="if(this.width>620)this.width=620;" onclick="window.open(this.src)" style="cursor:pointer" height="25" src="http://editerupload.eepw.com.cn/fetch/20131113/186305_2_1.jpg" width="16" style="zoom: 1" alt="" />輸出的負(fù)脈沖的寬度與時鐘脈沖高電平的持續(xù)時間相等。
第二個例子要求我們構(gòu)成一百進(jìn)制計數(shù)器,也就是說,計數(shù)器的狀態(tài)為0010到9910。因?yàn)?00等于10乘以10,所以我們可以用兩個74LS160構(gòu)成一個一百進(jìn)制計數(shù)器,其中一個計數(shù)器的狀態(tài)表示個位數(shù),另一個計數(shù)器的狀態(tài)表示十位數(shù),后者在前者的進(jìn)位信號控制下計數(shù)。我們有兩種方案。第一種方案稱為并行進(jìn)位方式[圖5.3.39]。
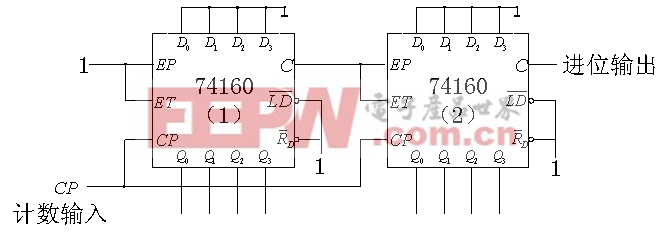
圖5.3.39 例5.3.3電路的并行進(jìn)位方式
這種方案的特點(diǎn)是兩個74LS160的CP端都接到時鐘脈沖上。不過,第一個74LS160始終工作在計數(shù)方式,每一個時鐘脈沖都使其狀態(tài)發(fā)生變化;第一個74LS160只有在第一個74LS160進(jìn)位輸出為高電平是才工作在計數(shù)方式,每十個時鐘脈沖才使其狀態(tài)發(fā)生變化。若計數(shù)器從0010狀態(tài)開始計數(shù),則第九個時鐘脈沖到達(dá)后,第一個74LS160的狀態(tài)變?yōu)?10且進(jìn)位輸出變?yōu)楦唠娖剑沟诙€74LS160進(jìn)入計數(shù)方式。因?yàn)榈诙€74LS160進(jìn)入計數(shù)方式的時間比第九個時鐘脈沖到達(dá)的時間晚,就是說,第九個時鐘脈沖到達(dá)時第二個74LS160尚未進(jìn)入計數(shù)方式,所以,第九個時鐘脈沖并不能使第二個74LS160的狀態(tài)發(fā)生變化,其狀態(tài)仍為010。于是,計數(shù)器的狀態(tài)為0910。第十個時鐘脈沖到達(dá)后,第一個74LS160的狀態(tài)變?yōu)?10且進(jìn)位輸出變?yōu)榈碗娖剑沟诙€74LS160退出計數(shù)方式。因?yàn)榈诙€74LS160退出計數(shù)方式的時間比第十個時鐘脈沖到達(dá)的時間晚,就是說,第十個時鐘脈沖到達(dá)時第二個74LS160尚未退出計數(shù)方式,所以,第十個時鐘脈沖使第二個74LS160的狀態(tài)發(fā)生變化,其狀態(tài)變?yōu)?10。于是,計數(shù)器的狀態(tài)為1010。第二種方案稱為串行進(jìn)位方式,這種方案的特點(diǎn)是,兩個74LS160都始終工作在計數(shù)方式。不過,第一個74LS160的CP端接到時鐘脈沖上,每一個時鐘脈沖都使其狀態(tài)發(fā)生變化;第一個74LS160的CP端接到第一個74LS160進(jìn)位輸出上,每十個時鐘脈沖才使其狀態(tài)發(fā)生變化。經(jīng)常有學(xué)生問:“為什么在第一個74LS160的進(jìn)位輸出端和第二個74LS160的時鐘脈沖輸入端之間要加上一個非門呢?”這里面有點(diǎn)兒奧妙。若計數(shù)器從0010狀態(tài)開始計數(shù),則第九個時鐘脈沖到達(dá)后,第一個74LS160的狀態(tài)變?yōu)?10且進(jìn)位輸出變?yōu)楦唠娖健H绻麤]有這個非門,第一個74LS160的進(jìn)位輸出端的電平變化將使第二個74LS160的狀態(tài)發(fā)生變化,其狀態(tài)變?yōu)?10。于是計數(shù)器的狀態(tài)就從0810變成1910,而不是我們所希望的0910。有了這個非門,情況就不一樣了,因?yàn)榈谝粋€74LS160的進(jìn)位輸出端的脈沖上升沿被非門轉(zhuǎn)換成下降沿,所以第一個74LS160的進(jìn)位輸出端的電平變化并不能使第二個74LS160的狀態(tài)發(fā)生變化,其狀態(tài)仍為010。于是計數(shù)器的狀態(tài)就從0810變成我們所希望的0910。第十個時鐘脈沖到達(dá)后,第一個74LS160的狀態(tài)變?yōu)?10且進(jìn)位輸出變?yōu)榈碗娖健R驗(yàn)榈谝粋€74LS160的進(jìn)位輸出端的脈沖下降沿被非門轉(zhuǎn)換成上升沿,所以第一個74LS160的進(jìn)位輸出端的電平變化使第二個74LS160的狀態(tài)發(fā)生變化,其狀態(tài)變?yōu)?10。于是計數(shù)器的狀態(tài)又從0910變成1010。
我們再舉一個用74LS160構(gòu)成二十九進(jìn)制計數(shù)器的例子。因?yàn)?9是一個素數(shù),除了1和它本身外,不能表達(dá)為兩個整數(shù)的乘積,所以我們要把工作分解成兩個步驟。第一步,我們用兩個十進(jìn)制計數(shù)器構(gòu)成一個一百進(jìn)制計數(shù)器;第二步,我們用這個一百進(jìn)制計數(shù)器構(gòu)成二十九進(jìn)制計數(shù)器。第一步可以采用并行進(jìn)位方式或串行進(jìn)位方式實(shí)現(xiàn);第二步可以用置位法或復(fù)位法實(shí)現(xiàn)。因?yàn)檫@里要對兩個74LS160同時置位或復(fù)位,所以也稱為整體置位法或整體復(fù)位法。
塵埃粒子計數(shù)器相關(guān)文章:塵埃粒子計數(shù)器原理










評論