基于DSP通訊全橋開關電源的研究與設計

其中諧振電感值按0.7倍滿載以上實現零電壓開關設計,取負載電流為2A(取滿載電流的10%)時濾波電感的電流臨界連續,即式中的脈動量為4A。開關管IRFB20N50的漏源極電容為85pF。所以將上述結果代入經驗公式可以得到本文引用地址:http://www.104case.com/article/181324.htm

6)輸出濾波電路設計
(1)輸出電感的選擇
電感將決定在輸出側紋波電流的大小,且它的值與紋波電流的大小有關。電感值是以輸入側的交流電流峰值所決定的。而交流側的峰值電流是出現在電壓為最小值時,根據一般的經驗考慮電感上的紋波電流取交流側峰值電流的20%,所以。根據下述經驗公式可以得到電感L。
電感電流出現最大峰值時的占空比為
(2)輸出電容的選擇
輸出電容的選擇應滿足最大輸出紋波電壓u的要求,而輸出紋波幾乎完全由濾波電容的等效串聯電阻的大小決定,通常通過選擇合適的等效串聯電阻來滿足輸出紋波電壓的峰一峰值的,這里取u為0.1V。因此有
![]()
另外,對于鋁電解電容器,在很大容值及額定電壓范圍內,其ResrCf的乘積基本不變,為50×10-6~80×10-6。根據ResrCf的平均值來求解Cf,即
實際選用三個60V/1000μF的電解電容器并聯。
7)采樣電路設計
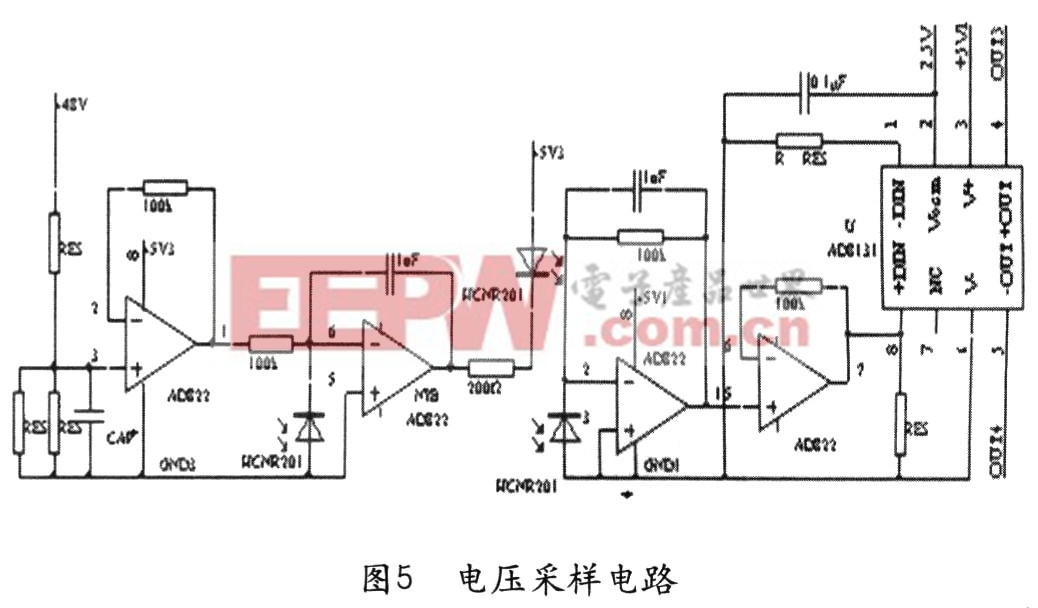
(I)電壓采樣電路
圖5所示的電壓采樣電路是采樣48V輸出電壓,經過電壓跟隨電路及線性光耦HCNR20l,傳輸給差分放大電路AD8131變成差分信號傳入高速AD轉換器。
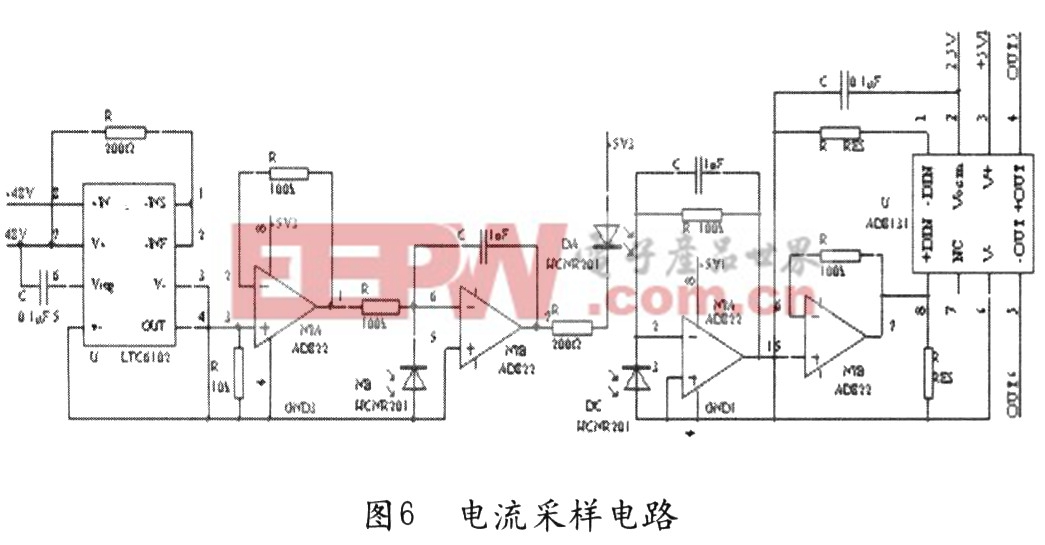
(2)電流采樣電路
圖6所示的電流采樣電路是實時監測輸出電流(20A),該采樣電路由電流檢測放大器LTC6102,基本放大電路,線性光耦HCNR201以及差分放大電路AD813l組成。
3 系統的軟件設計
主控制器采用DSP處理芯片,外擴16位高速AD采樣,以滿足實時要求,控制算法采用模糊自適應PID控制算法。控制程序主要由主程序和中斷程序組成。中斷包括定時器周期中斷、定時器下溢中斷、比較單元比較中斷。其中,每個比較單元均會在一個對稱PWM周期內產生兩次匹配,一次匹配在前半周期的遞增計數期間,另一次匹配在后半周的遞減計數期間,所以兩個比較單元會在一個PWM周期內通過四次中斷完成PWM輸出跳變。
4 模糊自適應PID控制器的設計
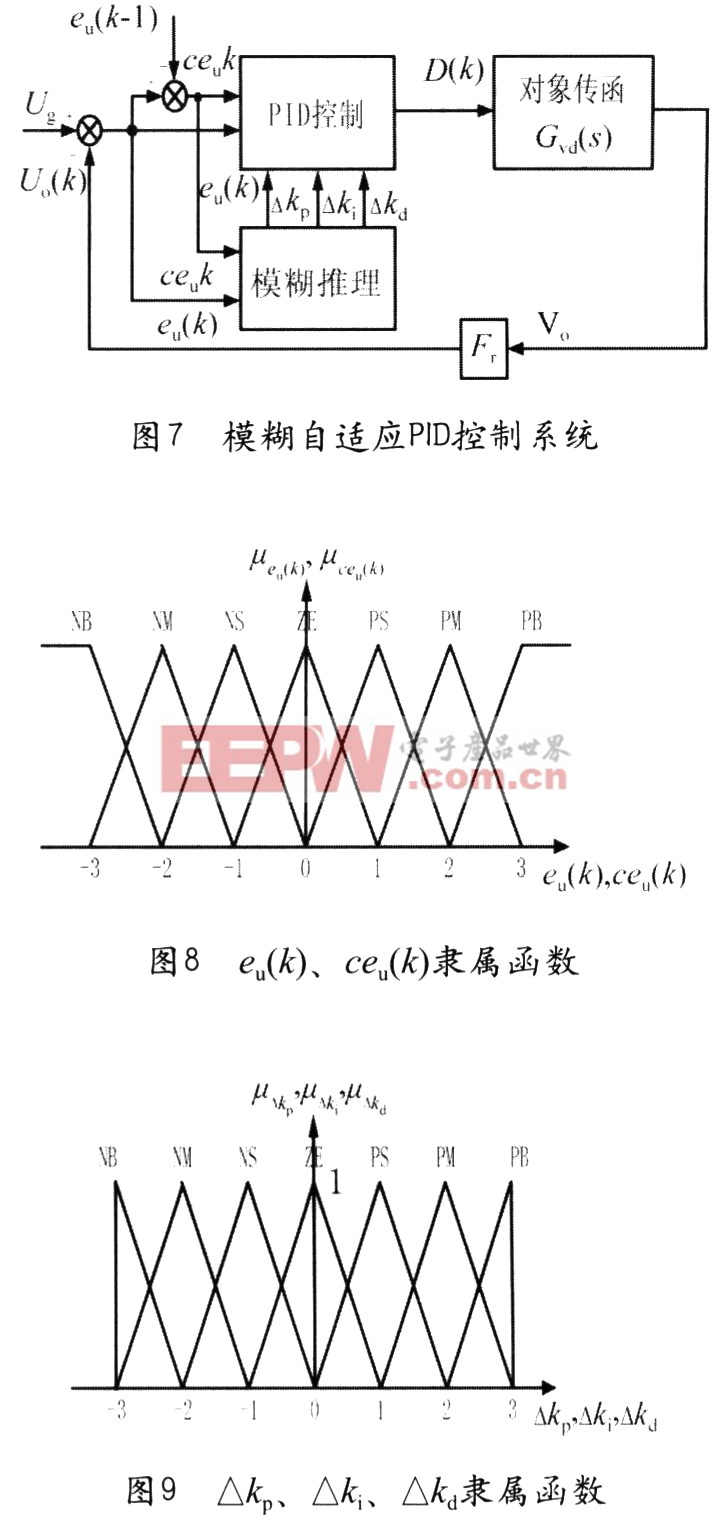
模糊自適應PID控制系統框圖如圖7所示,該圖中模糊自適應PID控制器以電壓誤差eu(k)和誤差變化率ceu(k)作為輸入,針對不同情況對PID參數進行調節,模糊推理的輸出結果△kp、△ki、△kd與常規PID控制參數kp、ki、kd分別相加,作為修正后的PID參數模糊自適應PID控制的核心在于設計模糊隸屬函數和控制規則。首先,確定模糊控制器的輸入變量eu(k)和ceu(k)、輸出變量△kp、△ki、△kd的模糊集合為7個模糊子集:[正大(PB),正中(PM),正小(PS),零(ZE),負小(NS)、負中(NM),負大(NB)]。各變量的模糊集論域均為[一3,一2,一1,0,1,2,3],實際中通過調節量化因子和比例因子將各變量變化范圍映射到論域范圍。隸屬函數均采用三角形隸屬函數,eu(k)、ceu(k),△kp、△ki、△kd的隸屬度函數分別表示在圖8和圖9中。模糊推理采用Mamdani方式,解模糊方法為面積重心法。

pid控制器相關文章:pid控制器原理










評論