基于CAN總線的并聯逆變電源通信監控系統研究

遠程發送請求位(RTR)用來確定是發送數據幀還是遠程幀。當RTR為高電平時,CAN控制器發送遠程幀;為低電平時則發送數據幀。
數據長度碼(DLC)用來確定每幀要發送的數據字節數,最多為8個字節。
控制命令表示此幀所表示的意義,在本文中控制命令字意義如表2所示。本文引用地址:http://www.104case.com/article/181090.htm

2.3 程序流程設計
主從控制是一種較為成熟的逆變電源并聯控制方法,本設計采用爭主主從控制策略實現對并聯逆變電源系統的通信監控。
若設置郵箱3為發送非廣播郵箱,郵箱2為接收非廣播信息郵箱,郵箱4為發送廣播的郵箱,郵箱0為接收廣播的郵箱。則信息接收和發送的程序流程圖分別如圖4和圖5所示。
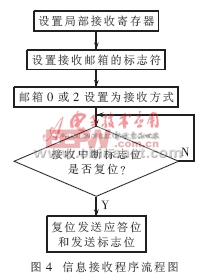
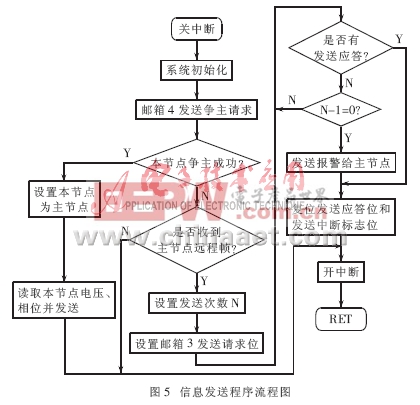
從流程圖可以看出,整個通信系統主要分為一個主節點和多個子節點。其中每個子節點都會用到郵箱4,在一定的時間間隔定期以廣播的形式向總線發送爭主請求,以探測主節點是否工作正常。如果工作正常,主節點便會發送反對爭主請求的響應,并且此響應也是在總線上以廣播的形式發送。所以網絡上每個節點都會收到爭主請求和反對爭主請求響應。郵箱0的功能就是接收并區分這2種信息,并判斷自身的地位,決定是否利用郵箱4發送反對爭主請求。郵箱2的主要功能是接收主節點的控制信息,并且通知郵箱3發送響應的響應信息。
圖5較為詳細地給出了信息發送流程。用DSP匯編指令編寫的本系統CAN通信爭主部分程序清單如下。
LDP#DP_CAN
SPLK#0040H,TCR;郵箱4發送爭主請求
LDP#DP_PF2
LARAR7,#4H
LDP#DP_CAN
MAR*,AR4;發送次數
LARAR4,#0FFFFH
W_TA5:LDP#6
SBRK#01H
SARAR4,30H
LACL30H
BCNDW_TA7,EQ
LDP#DP_CAN
BITTCR,1;等待發送應答
BCNDW_TA5,NTC
SPLK#4000H,TCR
LDP#DP_CAN
MAR*,AR4;發送次數
LARAR4,#0FFFFH
W_TA7:LDP#DP_CAN
MAR*,AR4;發送次數
LARAR4,#0FFFFH
W_TA6:LDP#6
SBRK#01H
SARAR4,30H
LACL30H
BCND W_TA9,EQ;寫郵箱內容,配置參數給定
LDP#DP_USER
BITCAN_FLAG1,BIT0;判斷是否接到反對主節點申請的響應
BCNDW_TA6,NTC;若沒有反對,則修改郵箱4的ID1、ID0,為10時表示此節點為主節點
LDP#DP_USER
SPLK#00H,CAN_FLAG1
LDP#DP_CAN
SPLK #4000H,TCR;清TA4和MIF4
CALLLOOP11;郵箱3發送數據
利用現場總線控制技術可以方便地構建分布式逆變電源局域控制網,使電源系統具有現場網絡控制系統(FCS)的特征。該方法不僅繼承了集散控制系統(DCS)的優點,且集數字通信、智能網絡控制于一身。本文所介紹的系統不僅使逆變電源并聯連接簡潔,同時為各模塊提供了穩定可靠的數據通信,實現了系統參數設定、并聯逆變電源模塊的靜態均流和模塊爭主等控制功能,且系統結構簡單,運行可靠。









評論