基于CAN總線的并聯(lián)逆變電源通信監(jiān)控系統(tǒng)研究

1 系統(tǒng)組成
1.1 系統(tǒng)網(wǎng)絡(luò)結(jié)構(gòu)
系統(tǒng)組成如圖1所示。系統(tǒng)由監(jiān)控主機(jī)、并聯(lián)電源模塊和CAN總線構(gòu)成。逆變電源模塊主要由PWM逆變器、DSP控制器、信號采樣和負(fù)載均流以及通信控制等部分構(gòu)成,選用TMS320LF2407A(DSP)作為控制核心。DSP根據(jù)反饋電壓、電流值與設(shè)定值差控制輸出PWM脈沖,驅(qū)動逆變橋功率開關(guān),輸出頻率、幅值、相位可調(diào)的正弦電壓。由LF2407A內(nèi)嵌CAN控制器接收來自CAN總線的命令實(shí)現(xiàn)對并聯(lián)逆變電源模塊的控制。
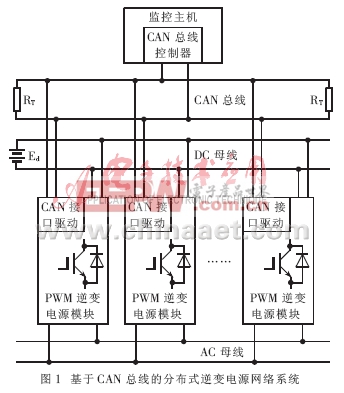
此種拓?fù)浣Y(jié)構(gòu)的特點(diǎn)是多個網(wǎng)絡(luò)通信節(jié)點(diǎn)共用一條傳輸線,不僅信道利用率較高,而且連接簡單,成本低,系統(tǒng)可靠性高。信息傳輸采用CAN通信協(xié)議,傳輸介質(zhì)采用雙絞線,如果需要進(jìn)一步提高系統(tǒng)的抗干擾能力,還可以在控制器和傳輸介質(zhì)之間加接光電隔離等措施。
1.2 系統(tǒng)主要硬件
硬件模塊電路如圖2所示。因LF2407A芯片本身含有內(nèi)嵌式CAN控制器,所以硬件設(shè)計較為簡單,只需加一個收發(fā)器SN65HVD232D就可實(shí)現(xiàn)此節(jié)點(diǎn)與總線的接口。
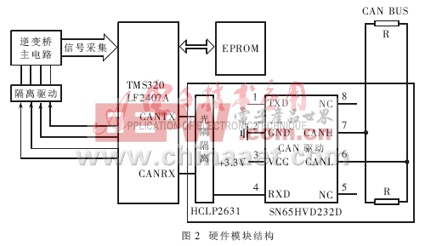
SN65HVD232D是TI公司的CAN協(xié)議控制器和物理總線的接口芯片,符合ISO11898標(biāo)準(zhǔn)。它對總線提供差動發(fā)送能力,而對CAN控制器提供差動接收能力。終端加接120Ω匹配電阻,以保證數(shù)據(jù)通信的抗干擾能力及可靠性。
2 軟件設(shè)計
2.1 波特率設(shè)置的編程
CAN總線的傳輸速率與2個節(jié)點(diǎn)間的最大距離有關(guān),表1給出了CAN總線系統(tǒng)任意二節(jié)點(diǎn)間最大距離與位速率的關(guān)系。表中還同時給出LF2407A的位定時器配置寄存器BCR2和BCR1的數(shù)值。這些值的設(shè)定與LF2407A的主時鐘頻率有關(guān)。一般地可以按下面的公式計算位速率:
波特率=ICLK/[(BRP+1)×bitTime] (1)
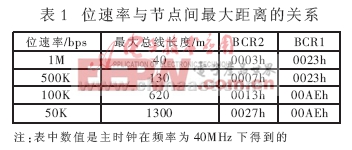
其中ICLK為DSP系統(tǒng)頻率,BRP由位定時器配置寄存器BCR2決定。
bitTime=(TSEG1+1)+(TSEG2+1)+1 (2)
其中TSEG1和TSEG2由位定時器配置寄存器BCR1決定。
2.2 幀結(jié)構(gòu)設(shè)計
按照CAN2.0規(guī)范,CAN總線上傳送的報文由3~11個字節(jié)組成,其中包含3個字節(jié)的控制字節(jié)和0~8個字節(jié)的數(shù)據(jù)字節(jié)。
一個有效的CAN數(shù)據(jù)幀由幀起始、仲裁域、控制域、數(shù)據(jù)域、校驗(yàn)域、應(yīng)答域和幀結(jié)束組成。TMS320LF2407A的CAN控制器支持2種不同的幀格式:標(biāo)準(zhǔn)幀和擴(kuò)展幀。它們主要區(qū)別在于仲裁域格式不同,標(biāo)準(zhǔn)幀仲裁域由11位標(biāo)識符和遠(yuǎn)程發(fā)送請求位RTR組成;擴(kuò)展幀仲裁域則由29位標(biāo)示符和替代遠(yuǎn)程請求位SRR位、標(biāo)志位和遠(yuǎn)程發(fā)送請求位RTR組成,如圖3所示。










評論