CO2焊接逆變電源及其智能模糊控制

3.1自由過渡的弧長控制
根據開環試驗粗選的焊接送絲速度與電流,系統在焊接中因擾動導致弧長不穩定,通過焊接電壓反饋和模糊控制調節,控制器采用單片機構成和實現。
設燃弧電壓偏差為E,燃弧電壓偏差變化率為EC,焊接電流調整量為△I,選取其論域、模糊語言變量,按照正態分布確定隸屬函數。燃弧電壓偏差考慮了熔滴尺寸造成的波動,有助于克服電弧暴躁。根據經驗確定規則,然后按照FUZZY推理合成規則計算出模糊關系矩陣,選用加權平均法解模糊,構成控制系統查詢表。它實時處理速度快,反映了模糊控制并行處理、適應性強的特點。
E={NB、NM、MS、NO、PO、PS、PM、PB}
EC={NB、NM、NS、0、PS、PM、PB}
△I={NB、NM、NS、0、PS、PM、PB}
基本模糊器設計有主觀性,要根據試驗來確定,且不是唯一的,以達到較滿意的控制效果為目標。由于電壓的偏差考慮了瞬時熔滴過渡,是符合實際特點的。同時,軟件設定了電壓門限,當偏差過大時電流下降到維弧電流,當接近短路時則進行短路控制。
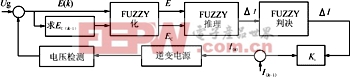
圖4 弧長模糊控制原理
3.2短路過渡的過程控制
短路過渡的控制可分為兩個層次,一是僅對短路過程本身的控制,二是通過短路頻率控制保證穩定性。這里首先討論短路過程控制。
短路過渡是短路和燃弧的交替過程。短路期間實際上是控制電流上升,燃弧期間才是控制弧長,即電弧電壓控制。與傳統控制方法相比,這是分時控制。短路期間的電流控制原理可根據電弧物理狀態而進行,但實際上由于逆變器短路時間常數(L/Rsc)大,因此尚難得到理想效果。為了簡化設計,采用了短路后電流不變,延時(1ms)后控制電流上升率。在燃弧期間,通過電弧電壓反饋和模糊控制,調整電流來控制弧長,方案與上相同。
但是,由于焊接過程的隨機性,僅對短路過程本身控制還不夠。在給定的弧壓控制下,擾動將引起短路頻率變化。因此,還需引入短路過渡的頻率控制。
3.3短路過渡的頻率控制
以短路頻率給定為目標,實際短路頻率偏差E,偏差變化率EC,用單片機實現模糊控制器,控制量為燃弧電壓給定值△U。然后,在上述弧壓控制過程中,實現逆變器的電流調整。這是一種間接控制。考慮這一控制的低頻特點,約0.25s進行一次修正,計算量較少。為了便于靈活調整,未采用固定的模糊控制表,而是采用了具有修正因子的控制器。
△Ug=αEi+(1-α)ECi
其中0α 1, i取 遍 所 有 量 化 等 級 。
這種方法不僅簡單靈活,而且有明顯的物理意義。它模仿了人工操作手動控制的思維特點,修正因子的大小表示對偏差和偏差變化率所加的權重。同時,反映了人工思維過程的連續性和瞬時單值性特點,而且可避免控制規則可能的不平滑性。修正因子的大小可通過多次試驗和離線調整選擇。
考慮到電弧過程的影響因素復雜和時變特點,上述完全根據試驗建立的模糊控制系統應該引入一定的適應能力。當誤差較大時,系統控制量應加大比例成分、減少微分分量以提高響應速度,即應取較大的α。否則相反。根據這一想法,在對修正因子有一定約束的條件下,采用線性插值的方法,調整控制因子。
α=[(αH-αL)Ei/m]+αL
αH、αL分別為α的最大和最小取值,m為量化等級數。
可看出,該方法避免了復雜的計算過程,只需經過簡單的比較及加減法即可,便于單片機實現。在上述公式中,通過實時修正控制因子,達到自學習目的。
3.4雙旋鈕自適應調節方式
在焊機面板上,設定兩個電位器。一個為名義平均電流,設定送絲速度。另一個為名義平均電壓,設置電弧狀態,當自由過渡時是弧長(弧壓),當短路過渡時是頻率。其大小決定自由過渡或短路過渡焊接模式,從而選取不同的控制參數和策略方法。查表確定焊接電流初值,通過智能控制,調整焊接電流,實現對電弧和熔滴過渡的控制。
與普通CO2的一元化控制不同,該系統可由操作者選擇,實現了電弧狀態可控,而不是局限于某一狀態,同時又實現了智能化的自適應控制。可稱之為“雙旋鈕自適應調節”。
4試驗結果
采用這種自行研制的IGBT逆變電源進行了CO2氣體保護焊接,焊絲為直徑0.8mm的H08Mn2Si覆銅焊絲,分別采用了200A拉絲焊槍和S86A推絲式送絲機進行焊接試驗。
模糊控制的自由過渡,提高了弧長穩定性,同時電弧柔順,焊接過程幾乎無飛濺,成型良好。在平焊位置,具有最好效果。智能模糊控制的短路過渡,飛濺較自由過渡略有增加,但過程穩定。可控短路頻率約80Hz。在較低頻率,半自動焊能獲得最佳效果,可以獲得細密的焊縫而無粗大波紋。高頻時焊縫熔深小、堆高大、需相應提高焊接速度。
如圖6所示,為恒流CO2逆變電源的短路過渡電流波形,其中(a)、(b)分別為智能模糊控制前后的波形。

圖5短路頻率模糊控制

(a)
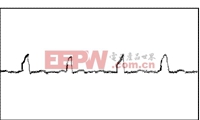
(b)
圖6CO2逆變電源焊接電流波形
5結論
在分析了CO2焊接過程控制特點的基礎上,設計了恒流型IGBT逆變電源,并進而提出了弧長和短路頻率智能模糊控制方案。試驗表明,采用該技術,有助于克服CO2焊接存在的飛濺大、成型差和參數調節問題,可以更好地實現電弧狀態的控制。




評論