功率因數校正(PFC)的數字控制方法

數字控制器包括一個電流環和一個電壓環。對于電流環,將指令輸入電流減去輸入電流iL,n所得的電流誤差ie,n輸入到電流環數字PI控制器。最后,將控制器輸出的占空比Dn輸入到PWM產生單元,控制開關S的通斷。對于電壓環,PFC變換器的輸入電導期待值ge,n與輸入電壓vin,n相乘,得到指令輸入電流iL,n*。
2 數字控制的實現
在實現一個電力電子系統的實際數字控制器時,需要考慮大量的因素,比如,控制處理器的選擇,采樣算法和采樣頻率的確定,PWM信號的產生,控制器和功率電路之間的連接,硬件設計和控制算法的軟件實現等。這些因素都會對系統的性能產生很大影響,需要細心設計和實際實驗。
2.1 微處理器的選擇
在設計控制系統時,微處理器的選擇需要考慮很多的因素,諸如功能,價格,硬件設計的簡單性和軟件支持等。現在,已經有多種內嵌有PWM單元和A/D轉換等控制外設的DSP芯片可供選擇(比如TI的TMS320C2XX系列,AD的ADMCXXX系列,Motorola的DSP56800等)。以TI公司的TMS320C2XX系列為例,它擁有很多良好的特性,比如,多個獨立可編程的時鐘,50ns指令周期,16位并聯乘法器,兩通道多路復用的10位A/D轉換器,還有片內RAM和EEPROM等。這使得它成為實現功率變換系統數字控制的首選。如果需要進一步降低成本,可以選擇STmicro-controller的8位DSPST52x420。
2.2 采樣算法和采樣頻率的選擇
在設計數字控制器時,選擇合適的采樣頻率起著重要的作用,因為,采樣頻率直接影響到可完成的功能和數字控制系統的可靠性,因此,它應該在合成控制器之前確定。對于更高的系統帶寬要求,應該使用更高的采樣頻率。然而,采樣頻率的提高也對字長和數字控制器的計算速度提出了更高的要求。工程設計的目標總是使用更低的采樣頻率來達到給定的設計要求。
由于Boost變換器的輸入電流含有大量諧波。因此,采樣頻率必須遠高于開關頻率,輸入電流才能不失真地還原。由于開關頻率已經很高(>20kHz),要采用更高的采樣頻率是困難的,而且,處理器也來不及處理相應的控制計算任務。而使用比較低的頻率將產生頻譜重疊。雖然可以在A/D轉換前加入前置濾波,但是,這樣又需要更高的帶寬。因此,采樣頻率選擇與開關頻率同步,這樣,開關紋波就成為隱性振蕩,不會在還原信號中出現。這種采樣方法在一個周期中只采樣一次,稱為SSOP(single sampling in one period)方法。采用這種采樣方法時,有一個采樣點確定的問題。電感電流在開關的瞬間存在電流尖峰,如圖3所示。顯然,應該避免在開關點進行采樣,否則系統將不能正常工作。在PFC應用中,輸入電流必須跟蹤輸入電壓,而且輸出電壓要保持恒定,PWM信號將在一個大的范圍內變動,因此,這個問題變得更加突出。
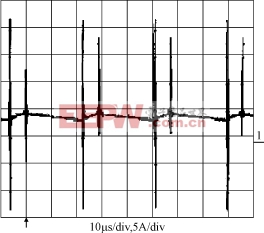
圖3 存在高頻噪聲的電感電流
為了保證在每次開關周期中確定一個固定的采樣點,而且遠離開關點,一個簡單的設想就是在兩個尖峰之間(上升沿或者下降沿)的中點進行采樣,即采樣平均電流。但是,當上升沿或者下降沿非常窄的時候(即開關的占空比非常窄或者非常寬),采樣信號的準確度仍然會受到開關噪音的影響。如圖4所示,如果采用上升沿采樣,當導通時間較長時〔圖4(b)〕,采樣點(Ai)是可靠的,反之是不可靠的〔圖4(a)〕。為了克服這個缺點,采用改進的采樣算法。這個算法同樣是同步采樣,但是,采樣邊沿的選擇取決于開關的導通時間。如果導通時間大于關斷時間,選擇上升沿;反之采用下降沿。這樣便很好地避免了開關噪聲的影響。而且算法本身簡單,計算量少。如圖5所示。
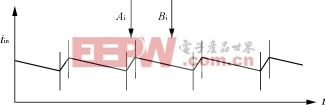
(a) 導通時間短

(b) 導通時間長
圖4 輸入電流波形
![]()
(a) 導通時間關斷時間

(b) 導通時間≈關斷時間

(c) 導通時間>關斷時間
圖5 改進采樣算法的采樣瞬間
2.3 PWM信號的產生
為了敘述方便,定義一個開關周期的起點p,如圖6所示。對大多數數字PWM單元來說,占空比的值應該在開關周期開始之前裝載入寄存器,因此,控制變量的采樣應該在p點之前準備好,以便控制算法的計算及時完成。這里采用平均電流控制,選擇采樣點,得到每個開關周期的輸入平均電流測量值。
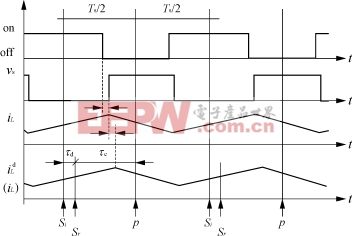
圖6 開關指令和測量輸入電流iLd之間的延遲
注:信號從上至下分別為:開關指令,開關S兩端的電壓vs,輸入電流iL,測量輸入電流iLd。
理想的采樣點si和實際采樣點sr之間有一個時間延遲τd。τd由兩個原因造成,一個是在信
號鏈中低通濾波器產生的相移,另一個是開關S的開關指令和實際開關動作之間的延遲。這樣,留給處理器完成控制計算的時間就是τc。延遲τd和計算時間τc共同決定了反饋環路的延遲。
gd(s)=![]() =
=![]() (1)
(1)
式中:Ts為開關周期。
使用頂點規則采樣PWM方法產生開關指令。如圖7和圖8所示。對于輸入信號u在平衡值附近的小偏移,頂點規則采樣PWM的響應可以描述為




評論