智能同步整流控制IC-IR1166/7A-B

3.1 UVLO/Sleep模式
IC保持在UVLO條件之下,直到VCC端電壓超過VCC開啟閾值電壓Vcc on。在IC處于UVLO狀態時,柵驅動電路處于非激活狀態。IC的靜態工作電流Iccstart流過,UVLO模式在VCCUVLO時,即為此種狀態,休息模式可以用將EN端電壓拉低到2.5V以下。在此時,IC也只有極低的靜態工作電流。
3.2 正常模式
一旦VCC超過UVLO電壓,IC即進入正常工作模式,此時,柵驅動可以開始工作,Icc最大的工作電流從VCC電壓源取得。
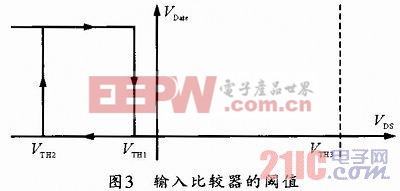
IR1167智能同步整流IC可以仿效整流二極管的工作,合適地驅動同步整流用的功率MOSFET。整流電流的方向檢測由輸入比較器采用MOSF-ET的RDSON作為并聯電阻,且據此給出柵驅動輸出,內部消隱邏輯用于防止抑制瞬態干擾,保證CCM或DCM或CRM的工作模式(見圖3)。在反激式變換電路中,有上述三種電流狀態。本文引用地址:http://www.104case.com/article/178709.htm
3.3 導通階段
當SR的MOSFET剛開始導通時,電流先經過其體二極管,產生一個負電壓VDS,體二極管壓降隨電流而增大,IC檢測此電壓,在其超過VT-H2時驅動MOSFET導通,作同步整流,在這一點IR1167驅動MOSFET導通,使VDS降下來,加入一段最小導通時間MOT(minimum on time),消隱干擾,保持MOSFET導通,因而MOT還限制了初級側的最大占空比。
3.4 DCM及CRM的關斷階段
一旦SR的MOSFET導通,會一直保持到整流電流減下來使VDS達到閾值VTH1時進入關斷,這和導通時工作模式相關。
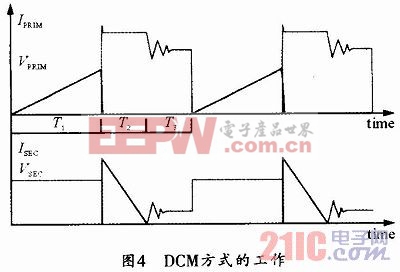
在DCM中,電流跨過閾值有相對低的di/dt。一旦跨過閾值,電流會再次流入體二極管,又使VDS電壓跳向負電平,它取決于電流總量。為防VDS又去觸發MOSFET到導通,在VTH2之后加入一段消隱時間tblank,在到達VTH1后。消隱時間由IC內設置。當VDS電壓變正進入VTH2時,消隱時間也由IC內設置,當VDS電壓變正進入VTH3時,消隱時間終止。IC進入下一周期工作。DCM模式的工作波形見圖4。






評論