單一DSP控制兩套三相逆變器的實現

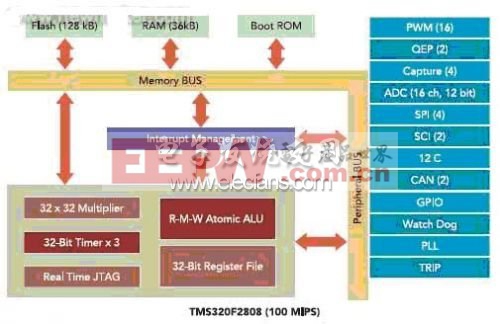
TMS320F 28XX 的內部結構圖表示了外圍接口、外圍總線和片內存儲器,其中外圍接口上部的六相PWM接口和兩套QEP 接口使得單一DSP 能夠控制兩臺電機。
依據前面描述的算法,為實現調速運行,需要以PID調節模塊計算PWM比較寄存器的值。全部算法以20 kHz的頻率運行,并于每個PWM周期刷新PWM占空比。為第二臺電機重復此過程,可實現以單一DSP控制器提供雙電機獨立驅動的完整控制。
定點算法開發
一種稱為IQMATH的專用定點數學函數庫,可基于DSP硬件和編譯器優化算法性能。IQMATH由高度優化的高精度數學函數集構成,可以用C/C++設計將浮點算法無縫地轉化成DSP的定點代碼。IQMATH程序使得以類浮點格式編寫定點程序成為可能,該程序還能處理在定點編程中需要額外考慮的飽和及溢出問題。而且,IQMATH程序特別適用于需要極高執行速度和運算精度的計算密集型實時應用。
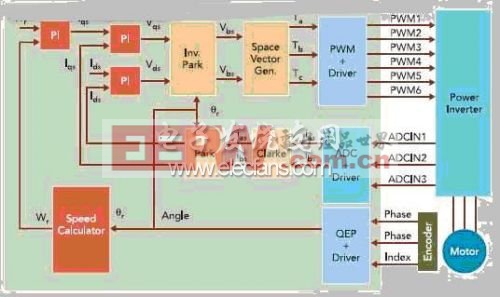
每臺電機的磁場定向控制都采用一組正交編碼器脈沖和Clarke-Park 變換
根據使用過的軟件模塊定義可以創建一種特殊數據結構,使多次重用軟件模塊成為可能,從而可以按照實現整個系統所需要的次數重復引用目標模塊。在雙驅動系統中,簡單地定義適當的數據類型,就可以將所需模塊引用兩次。實現雙重算法大約會消耗DSP片內63 kW Flash和18 kW RAM內存資源中的4 kW程序空間和0.5kW數據空間。
多重逆變控制器則需要為每臺電機配置專用的故障檢測信號接收引腳。
在多重逆變驅動中,故障管理需要重點考慮。操控單一逆變器的傳統DSP控制器通常只是包含單一的故障管理系統,出現故障時就關斷控制器。多重逆變控制器則需要為每臺電機配置專用的故障檢測信號接收引腳,例如:可能需要六個引腳分別對應兩臺電機中每臺的過壓、過流和過溫傳感器。單一電機的三個引腳共同連接到一個邏輯或模塊上,當任何一個引腳出現由低到高或由高到低的變化時,就產生一個中斷,關斷相應電機的PWM輸出。
試驗結果
雙電機驅動系統的軟件開發是分階段完成的,可以顯著縮減調試所需要的時間。新一代DSP控制器致力于解決成本問題,通過提供更強大的處理能力,多重編碼器接口以及數量眾多的PWM輸出,可以滿足兩臺甚至更多電機的控制需要。DSP內核結合必要的外圍接口可以簡化設計過程,并為實現附加驅動特性提供選擇余地。如果單一DSP控制器有能力操作多達四套三相電壓型逆變器,就可以徹底降低使用多臺電機的機械和運輸設備的成本和占地空間。

pid控制器相關文章:pid控制器原理










評論