基于電磁場檢測的尋跡智能車系統設計

劣勢:因線圈在磁場中的磁感應強度會受與導線的夾角影響,使得傳感器在不同位置獲得的電壓差值相同,造成誤識別;轉角不夠平穩。為了解決上述問題,提出了增多傳感器的方案,傳感器的安裝方式2如圖7所示。本文引用地址:http://www.104case.com/article/177754.htm
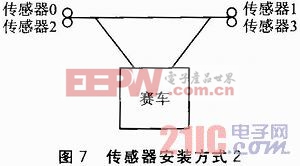
傳感器0和2、傳感器1和3分別成一定角度固定在賽車前方30 cm的兩側。這樣有效地避免了在大S等賽道上因夾角造成的丟線問題。但速度仍受限。
筆者從布局和算法兩方面入手。進一步改進,傳感器安裝方式3如圖8所示。
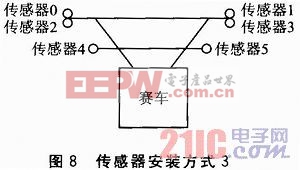
系統采用了雙排的傳感器排布方案。前排4個傳感器,后排2個傳感器。傳感器0、2與傳感器1、3分別位于賽車前方30 cm處,間距為25 cm;傳感器4、5分別位于賽車前方20 cm處,間距為20 cm。
兩排傳感器用法基本相同,位于前排的傳感器主要用于對賽道位置的計算;位于后排的傳感器用于當小車偏離量比較大時對位置進行輔助控制,同時輔助調節速度。
3.2 信號選頻放大
利用電感線圈得到的感應電動勢信號太弱,需要對采集后的信號進行放大、濾波處理。對交變信號的識別主要利用的是RLC并聯諧振
電路,等效電路如圖9所示。

R為電感的等效電阻,E為感應電動勢,C是并聯諧振電容。電路諧振頻率為:
![]()
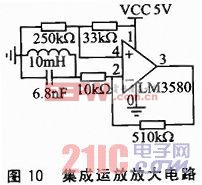
信號放大采用的是集成運放。雖然普通運放的頻率響應速度較低,但在實驗中發現,放大倍數對信號采集的影響不是很大,只要能夠滿足采樣的電壓要求即可。同時,使用集成運放能夠有效地隔離電路,引入的干擾少。在實驗中,利用集成運放進行半波放大和全波放大,發現全波放大效果更好,靈敏度較高,信號失真較小。集成運放放大電路如圖10所示。







評論