步進電機跟蹤伺服系統的設計

天線伺服系統總體結構如圖1所示。本文引用地址:http://www.104case.com/article/177752.htm
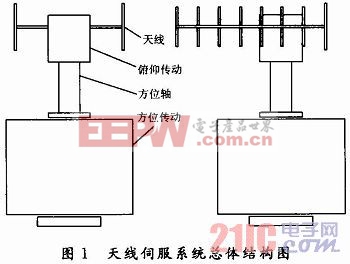
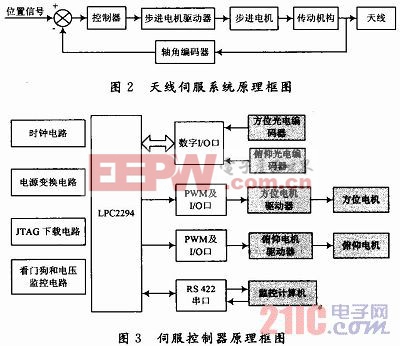
根據圖1總體結構和系統布局,分別對方位和俯仰傳動力矩進行了計算。在此選用MOTEC公司SM242系列兩相混合式步進電機作為驅動元件,并選用諧波齒輪減速機完成速度和力矩的轉換,諧波齒輪減速機減速比為65。同時,采用瑞普公司JSP3806系列光電編碼器作為位置檢測元件實現位置反饋。伺服系統原理框圖如圖2所示。
2.2 伺服系統硬件設計
對于伺服控制系統而言,目前常用的硬件方案有以DSP組成的伺服控制器和以MCU組成的伺服控制器。以DSP組成的伺服控制器具有控制精度高、響應速度快等優點,但其成本較高,不適用于低成本場合;而以MCU為控制器構成的系統具有結構簡單、適應性強、成本低等優點被廣泛使用。該系統以ARM單片機為核心構成伺服控制器,伺服控制器硬件原理框圖如圖3所示。
由圖3可以看出,伺服控制器是伺服系統的控制中心,步進電機控制信號的產生、光電編碼器角度信息的采集、位置信息的比較運算等都在伺服控制單元內完成。
該系統伺服控制單元采用PHILIPS公司的LPC2294單片機擴展而成,完成伺服系統的各種運算與控制。
2.3 伺服控制軟件設計
針對該系統的特點,伺服控制軟件主要完成以下功能:
(1)接收監控計算機的控制指令,并分解指令完成伺服系統的控制;
(2)產生符合頻率要求的步進脈沖和轉向脈沖,實現方位和俯仰電機的控制;
(3)實時采集光電編碼器角度信息,完成位置控制;
(4)實時將天線的指向位置、伺服系統的工作狀態等信息上報給飛控計算機;
(5)分別進行方位與俯仰的限位檢測,并進行軟件限位,防止設備破壞;
(6)完成無人機測控系統所要求的數字引導、自跟蹤等其他功能。
根據上述主要功能,將控制軟件劃分為相應的功能模塊,采用C語言編寫控制程序,完成伺服控制軟件的設計。
另外,對于步進電機控制來說,一般應用較多的是采用PID或PI控制算法。針對該系統的特點,由于天線的運行速度較低,為了充分利用單片機有限的資源,提高運算效率,采用簡單易行的數字PID算法進行電機的控制。
3 結語
本文以某無人機測控系統地面跟蹤伺服設備的研制為背景,從工程實際出發,設計了一種基于ARM的步進電機天線伺服系統。目前,該伺服系統已完成工程樣機的研制,并進行了相關試驗。試驗結果表明,該伺服系統滿足最初的設計要求,具有一定的工程實際意義,可以用于無人機和其他測控系統中天線的驅動與跟蹤。

伺服電機相關文章:伺服電機工作原理







評論