基于80C196KC的軟開關型脈沖MIG焊機的研究

4 電源控制系統設計
4.1 控制系統工作原理
在單片機閉環控制系統中,采用高性能的MCS-96系列單片機80C196KC作為電源控制系統核心,通過編程實現焊接過程控制、電流電壓采樣、A/D轉換、PI運算、參數預置等功能。整個系統采用閉環負反饋控制,逆變采用PWM方式控制輸出電流的大小,控制量經由MAX530組成的D/A轉換電路后送到脈寬調制芯片UC3846,輸出自帶死區的兩路PWM驅動信號,經過脈沖變壓器的隔離驅動IGBT,輸出恒流外特性。
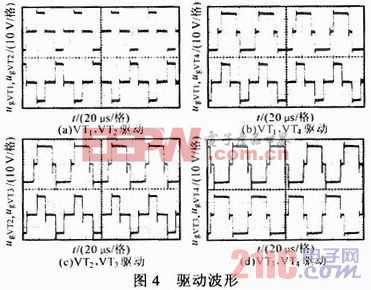
4.2 IGBT驅動波形
圖4為實測IGBT驅動波形,其中圖4a為同一橋臂VT1,VT2上的驅動波形ugVT1,ugVT2,由圖可知,兩路驅動波形相位相反,脈寬相等,與預期的目標相同。圖4b為同一導通回路VT1,VT4上的驅動波形ugVT1,ugVT4,即ugVT4一直保持最大脈寬,通過控制ugVT1脈寬來實現PWM調節。圖4c為VT2,VT3上的驅動波形ugVT2,ugVT3。圖4d為VT3,VT4上的驅動波形ugVT3,ugVT4。由圖可見,ugVT3,ugVT4一直保持最大脈寬,只有ugVT1,ugVT2的脈沖寬度是跟隨PI計算后的給定值而變化的,符合所設計的軟開關主電路要求。本文引用地址:http://www.104case.com/article/177435.htm
5 控制系統軟件設計
控制系統是在系統軟件的控制下工作的,控制程序作為整臺焊機的精髓所在,其結構的合理性、程序的實用性以及可靠性就成為數字化焊機的關鍵所在。合理的程序結構、正確的程序流程是保證焊機正常工作的基礎。
5.1 PI控制算法
PI運算是控制軟件部分主要完成的工作之一,數字PID控制算法的程序編寫較為簡單,根據所設計焊機的具體要求,并結合以往的研究結果,系統有比例、積分環節即可得到滿意的控制效果,加入微分項可以提高系統的動態品質,但其運算和參數調整較為復雜,會占用單片機過多的時間,降低了響應的快速性。故此處采用PID算法中的PI部分,其控制規律為:
![]()
式中:α=K(1+T/Ti),β=-K;ei,ei-1分別為第i次和第i-1次電流給定值與反饋值之差;I(i),I(i-1)分別為第i次和第i-1次輸出給MAX530的控制參量;α,β的值是通過大量實驗整定后確定的。



評論