無主可并聯逆變電源控制技術

主從設置法和平均電流法都無法實現冗余技術,使并聯電源模塊系統的可靠性得不到很好的保證;而采用自主均流芯片UC3902依據特有的性能,如:“均流精度高,動態響應好,可以實現冗余技術等”, 自主均流法實質上是在N個并聯的模塊中,輸出電流最大的模塊將自動成為主模塊,其余的模塊則成為從模塊,各個從模塊的電壓誤差依次被整定,以調節負載電流分配的不均衡。由于N個并聯的模塊中,事先沒有人為設定哪個模塊為主模塊,而是按輸出電流的大小隨機排序,輸出電流大的模塊自動成為主模塊。本控制系統采用此芯片可以直接得到均流誤差信號,簡化了控制系統復雜的電流計算,提高了系統可靠性。
UC3902集成芯片通過精確地調整變換器的輸出電壓以匹配所有的輸出電流。另外,此芯片有一個獨特的有利條件是使用了差模均載母線,這種結構大大增強了系統對噪音的抑制能力。UC3902均流芯片應用在電力電源中具有如下的特點:(1)均流精度高(2)外圍電路設計簡單,不象UC3907那樣過于復雜(3)易于做熱插拔操作。
4 軟件設計部分:
控制部分主程序主要完成開機檢測、均流計算、同步捕捉、計算調制度,輸出SPWM波、限流保護策略。
4.1 均流計算:
從理論上講DC/AC逆變模塊的并聯條件是:各模塊輸出電壓的頻率、相位和幅值以及內阻完全相同,才能實現并聯運行,并聯模塊輸出的電流、功率完全均衡。實際系統中,由于各模塊硬件的分散性是不可避免的,各模塊的基準正弦信號的頻率和幅值也會有微小差異;以上差異都會導致各模塊輸出電壓的相位和幅值不等;相位差會引起模塊之間產生有功環流,幅值差會引起模塊間產生無功環流。
由無功功率公式
,
可知(其中N為系統中并聯模塊總數,n表示第n個模塊,為功率因數,是均流差值),減少即可減少無功環流。
無功功率電流調節可采用功率偏差控制策略,逆變器通過模塊檢測出本模塊的均流偏差值,來調節本模塊輸出的電壓值,使各個并聯逆變器模塊輸出的無功功率相等,達到均流的目的。為了使得每個并聯逆變器的電流達到均等地目的,在每個并聯逆變器的控制環上除了電壓控制環之外還加了一個均流環。控制框圖如下圖3所示。在均流控制中,均流差值信號由均流芯片uc3902給出,均流環采用不完全微分PID控制,以減小由于單個模塊數據錯誤而對整個系統的沖擊。為保證實際均流的可行性和調整范圍,采用模糊控制的思想,限定均流實際輸出的電壓在一定范圍之內(即調整后的實際輸出電壓在標準電壓內),這樣可以保證均流的可靠性。同時單步調整的幅度不能過大,一般在1V以內,否則會引起較大的環流波動。
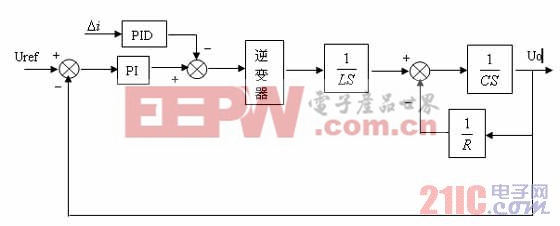
系統閉環控制圖3
4.2 同步控制策略
逆變電源系統中,為抑制模塊間環流的影響,必須保證各逆變模塊輸出電壓的相位、幅值及頻率的一致性,這是實現并機控制的前提。
本系統可并聯逆變器采用自同步和外同步結合的全新原理設計如圖4,在有外部同步信號的時候,逆變器輸出可以跟蹤電網同步或監控器給定的同步;在同步控制單元檢測一段時間如果沒有外同步信號,同步信號線自動切換到自激電路,保證監控單元出現故障也能夠正常工作。這種同步控制方式即使有某個模塊因為故障損壞不能輸出同步信號,也不影響并聯運行,從而實現了內同步和外同步相結合的同步機制,這是本系統一大特點。逆變器用2407A 的捕獲單元,通過捕獲同步脈沖,在中斷程序中完成與市電相位、頻率的同步。
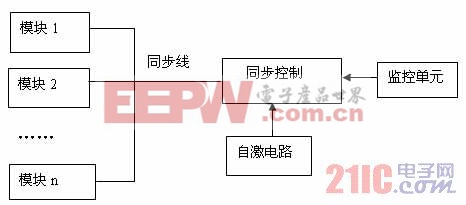
同步控制電路4










評論