新型直線電機運輸系統的開關電源設計

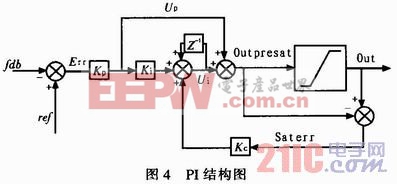
除了以上闡述的傳統PI控制,本系統還應用了前饋補償的思想,不再只以PI決定控制脈沖占空比,加入了前饋補償計算結果,使得控制系統的反應速度更快。PI調節模塊作為“微調”,使得輸出電壓紋波系數更小,穩定性更佳,有效抑制了系統因沖擊、震蕩所引起的輸出劇烈波動。具體應用方法如公式(17)所示。
![]()
上式中,D為最終IGBT控制脈沖占空比;PLout為PI調節模塊計算結果;Uref為前饋補償計算給定值,這里取各級電壓閉環的額定輸出電壓;Uin為前饋補償計算輸入值,這里取各級電壓閉環的輸入電壓。因此,Uref/Uin即為前饋補償計算結果。
2.4 保護策略
如前文所述,內蒙新型直線電機運輸系統試驗線存在弓網關系差的問題,在某些區段頻繁出現短時掉電-再上電的現象,進而在前級BUCK電路的電感、電容上產生沖擊電流、沖擊電壓。其中,尤以沖擊電流對系統的損害作用最大。經仿真,采用前文所選電路器件參數和閉環控制策略,10 ms脫弓情況下,電流沖擊一般會達到90A。除此之外,系統還可能出現各種過壓、過流故障。因此,采取有效的保護策略,抑制沖擊電流過大,保證系統穩定是十分必要的。具體保護邏輯如下:
1)輸入過壓——封鎖全部控制脈沖,過一段時間后(10 s)進行檢測,若此時并無過壓情況,則重新啟動脈沖。DC/DC變換電路直接恢復至保護前占空比,BUCK電路進入軟啟動模式,以當前UDC600V/UDC1500V為占空比起始點,依時序逐漸增大占空比,直到DC600 V達到額定值為止。輸入過壓保護值取1800V。
2)輸入欠壓——這種故障中主要出現于網側短時掉電情況下。輸入欠壓保護后,僅封鎖BUCK電路控制脈沖,在控制系統每一時序周期對網壓進行監測,一旦恢復正常,BUCK電路進入軟啟動模式,方式同I。輸入欠壓保護值取1 000 V。
3)DC600V過壓——封鎖全部控制脈沖,中間電壓經由壓倉電阻緩慢泄放,當低于550 V時,系統重新啟動脈沖。方式同I。DC600 V過壓保護值取700V。
4)輸出過壓、欠壓——封鎖全部控制脈沖,5 s后系統重新啟動。如果在1分鐘內重啟次數超過3次,則系統停機,不再重啟,人工進行故障修復。輸出過壓保護值取30 V,欠壓保護值取20 V。
5)輸出過流——當IfhIoutIdl時,即輸出發生過負荷,但尚未發生短路故障時,通過降低輸出電壓的方式抑制過負荷電流;當Iout> Idl時,即輸出發生短路時,封鎖全部控制脈沖,系統停機,人工進行故障修復。

3 系統仿真
利用MATLAB軟件實現系統仿真,搭建模型如圖5所示。
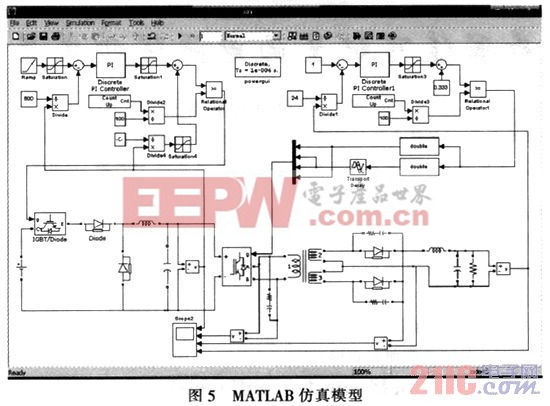
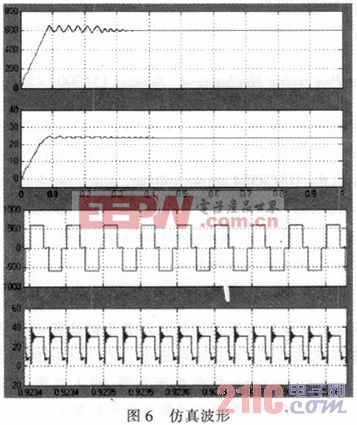
圖6所示為系統仿真電壓波形圖。1通道為DC600 V波形;2通道為DC24 V波形;3通道為變壓器原邊波形;4通道為二極管整流后波形。

模數轉換器相關文章:模數轉換器工作原理








評論