基于CAN總線的電流、電壓變送器的設(shè)計與實(shí)現(xiàn)

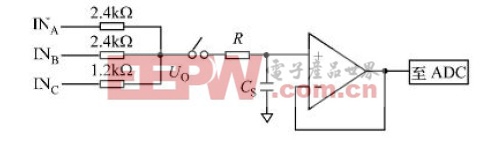
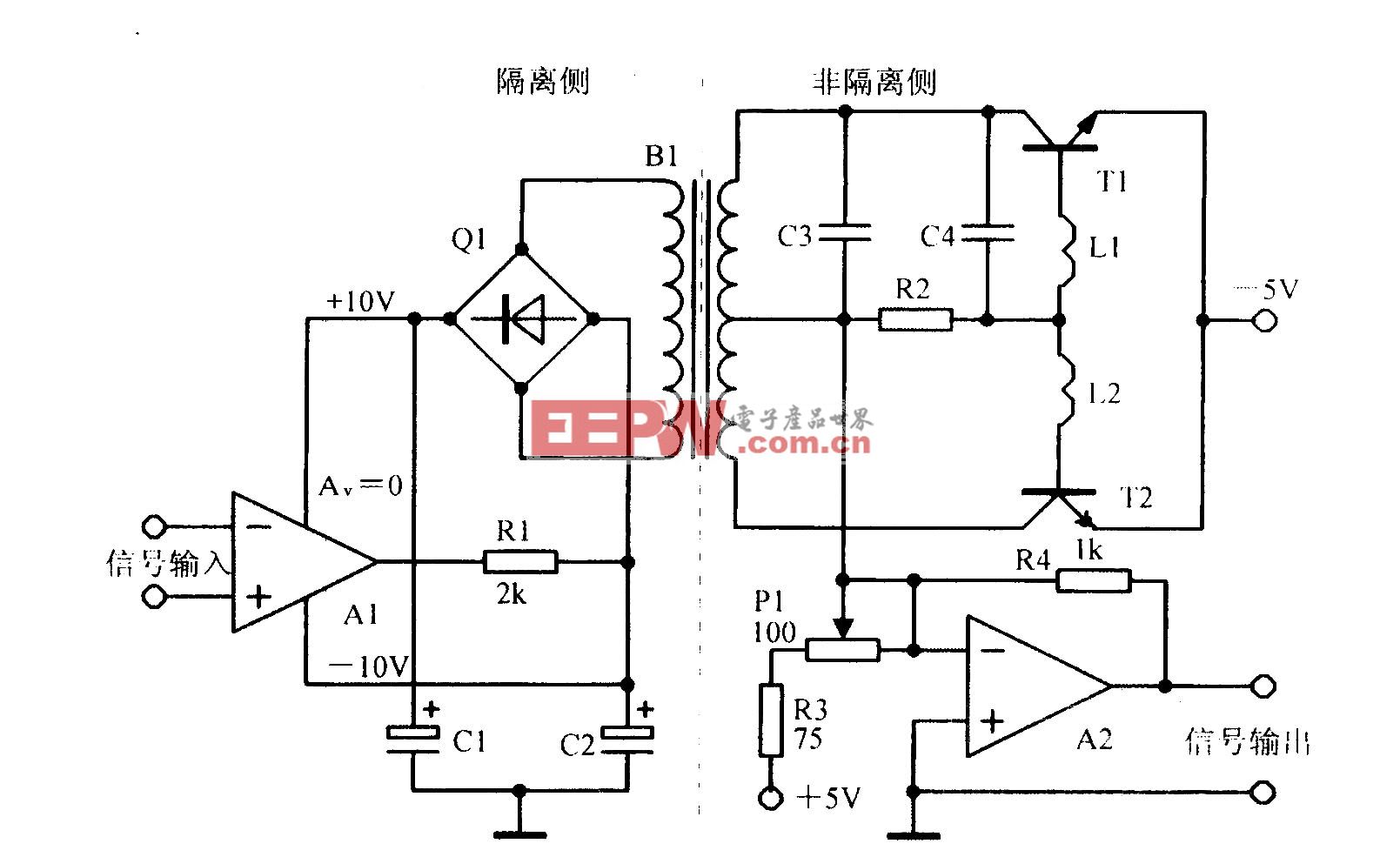
圖4電壓檢測原理。
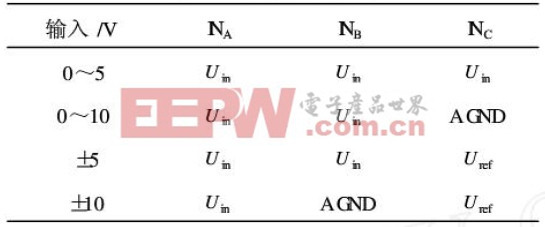
表1電壓輸入對應(yīng)表。注:本系統(tǒng)設(shè)計中Uref=5V.
CAN控制器采用單片機(jī)的內(nèi)置CAN控制器,其接口電路使用CAN收發(fā)器PCA82C250、電源隔離模塊和高速光電隔離器6N137,并采用保護(hù)電路。PCA82C250是Philips公司生產(chǎn)的CAN收發(fā)器,是CAN控制器和物理總線間的接口,用來提高總線驅(qū)動和通信抗干擾能力。其差分接收器共模抑制比寬,抗電磁干擾。它與ISO11898標(biāo)準(zhǔn)兼容,速度高達(dá)1Mb/s,抗汽車環(huán)境下的瞬間干擾。它內(nèi)部有總線保護(hù)電路和限流電路,并具有電流待機(jī)工作方式和降低射頻干擾的斜率控制。采用PCA82C250可以最多連接110個節(jié)點(diǎn),并且未上電的節(jié)點(diǎn)對總線無影響。
信號在傳輸線上遠(yuǎn)距離傳送時,如果遇到阻抗不連續(xù)的情況時,就會出現(xiàn)反射現(xiàn)象使信號扭曲,通常在傳輸線的末端接上120Ω的終端電阻來消除反射。為了保證信號質(zhì)量,PCA82C250與CAN總線的接口部分采用了一定的安全和抗干擾措施。PCA82C250的內(nèi)部CANH和CANL引腳各自通過一個5Ω的電阻與CAN總線相連,該電阻可以起到一定的限流的作用,使引腳免受過電流的沖擊;總線與地各自并聯(lián)一個30pF的小電容,具有一定的防電磁輻射和抗高頻干擾的功能;在總線和地之間分別反接一個IN4148反向保護(hù)二極管,起過壓保護(hù)作用。
3 CAN智能變送節(jié)點(diǎn)的軟件設(shè)計
3.1主程序
系統(tǒng)初始化主要包括I/O口、CAN控制器、中斷以及用戶標(biāo)志數(shù)據(jù)的初始化。該過程主要對PIC18F258的基本資源進(jìn)行配置定義,將復(fù)用的PORTA資源配置為通用數(shù)字I/O口,并通過設(shè)置其輸入輸出特性,保證MAX1166的輸入、輸出以及控制信號引腳都得以正確配置,開啟相應(yīng)的中斷源,配置CAN接口,用戶標(biāo)志數(shù)據(jù)賦初值,初始化過程結(jié)束。通過設(shè)置模擬信號輸入的相應(yīng)數(shù)據(jù)通道后,單片機(jī)上電即開始進(jìn)行電流、電壓信號的檢測。上位機(jī)一旦發(fā)送命令請求下位機(jī)回送采集數(shù)據(jù)等相關(guān)信息后,下位機(jī)馬上產(chǎn)生中斷,回送一幀數(shù)據(jù)信息。監(jiān)控流程圖如圖5所示。
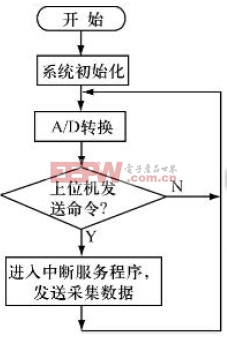
圖5系統(tǒng)監(jiān)控流程圖。
3.2A/D轉(zhuǎn)換模塊軟件設(shè)計
A/D轉(zhuǎn)換是通過MAX1166實(shí)現(xiàn)的。MAX1166的一次轉(zhuǎn)換過程可分為轉(zhuǎn)換準(zhǔn)備、模數(shù)轉(zhuǎn)換和轉(zhuǎn)換結(jié)果輸出3個階段。PIC18F258通過I/O口時序模擬MAX1166的控制信號,從而使MAX1166正常工作。MAX1166具體控制過程如圖6所示。
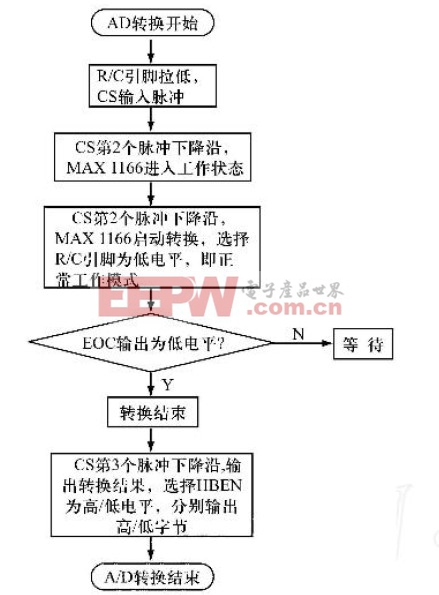
圖6ADC轉(zhuǎn)換流程圖。

基爾霍夫電流相關(guān)文章:基爾霍夫電流定律
電流變送器相關(guān)文章:電流變送器原理







評論