基于VRLA構建光儲聯合并網發電系統

3 系統控制原理
3.1 DC/DC工作原理
以下對DC/DC的控制分析以其工作在基于Buck原理的降壓模式為主,實現對蓄電池組的三階段充電。
圖3a中,由IGBT模塊的VT1,VD2及電感、電容等構成Buck電路,采用DSP2808作為控制核心,對電流、電壓采樣信號進行處理、計算后,生成PWM信號PWM1,控制VT1的通斷,調節輸出電壓和電流,從而實現對蓄電池組的充電。典型的VRLA單體電池為2 V/塊,以6節單體電池串聯構成的電池模塊為例,設計三階段充電模式,包括恒流充電、恒壓充電及涓流充電(浮充電)。
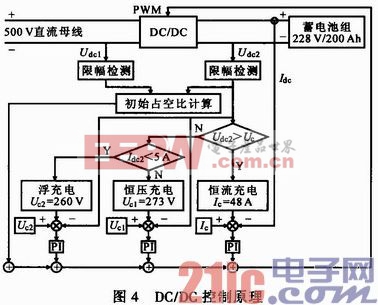
根據系統實際配置容量,確定充電缺省參數,實時監測蓄電池狀態,實現充電階段的自動切換。恒流充電時采用1/4倍率制,針對12 V/100 Ah電池組,充電電流為25PA(P為并聯組數);恒壓充電過充限壓值為14.4S V(S為串聯單體電池數),浮充電壓為13.65S V。控制程序采用電壓、電流閉環控制方式,將給定值與采樣反饋值進行比較,通過PI調節器得到相應占空比,與三角載波比較后生成PWM信號,程序可自動選擇充電階段,并將其他充電階段的PI值置零,控制原理如圖4所示。本文引用地址:http://www.104case.com/article/175977.htm
當DC/DC裝置工作在Boost模式時,從蓄電池組取電,并將直流電壓抬升至500 V,可實現穩定逆變器的輸入電壓,保證逆變并網環節的穩定運行。
3.2 DC/AC控制策略與實現
DC/AC裝置作為交直流系統的轉換環節,可在交流電網虧電時,將蓄電池的直流電能逆變為交流電并入電網;當蓄電池虧電時,使DC /AC裝置工作在整流狀態,同樣采用恒流、恒壓、涓流的三階段方式進行充電。采用基于電網電壓定向的矢量控制策略,控制原理如圖5所示。
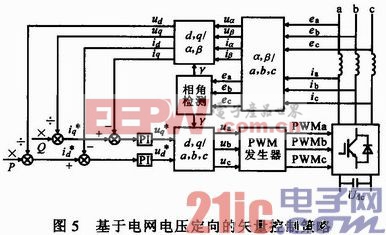
相角檢測環節中,鎖相采用過零點檢測技術。由于實際的電網電壓并非理想的正弦波電壓。使得電壓檢測值中除基波分量外還包含大量的諧波分量,這樣就使得基波電壓定向出現偏差,從而降低了系統有功、無功的控制性能。可通過軟件對采樣電壓信號進行濾波,而后再檢測其過零點,并針對所使用的低通濾波器參數給予相應的相位補償。對網側電壓、電流實時采樣,在電壓定向基礎上,通過對輸出電流的控制,實現并網逆變器輸出有功、無功功率的控制。

評論