基于ARM11的電梯綜合檢測系統的研究

3 系統軟件設計
3.1 上位機主控系統程序設計
3.1.1 平臺構建
本系統采用的是Windows CE 6.0嵌入式操作系統,使用的開發工具是Embedded Visual C++,基于MFC的開發方式,在S3C6410這一硬件平臺上進行開發。
3.1.2 驅動程序設計
對于Windows CE系統而言,驅動主要分為兩種:本地設備驅動和流接口驅動。這兩者之間最大的區別在于流接口驅動只提供一組通用的接口。
本地設備驅動,主要是常用設備的驅動,例如無線網卡驅動、LCD驅動、觸摸屏驅動等,這些都是已經內置好了的,微軟提供了專門的定制接口,使用的時候只需要通過這些接口就可以調用驅動程序了。系統啟動時由GWES來加載實現啟動這些本地設備驅動。
流接口驅動,它的主要功能是使得Windows CE系統和外圍設備能夠進行連接和通信。相對于本機驅動程序來說,所有的流驅動程序都使用同一個流接口函數集。本系統中的信號采集板模塊的驅動程序就屬于流接口的驅動程序。
下面是信號采集模塊的流驅動設計,將信號采集模塊命名為SCM(Signal collection module),首先要編寫SCMDriver.cpp文件,該文件除了具備上述所需的接口外,還要添加AD轉換部分,下面是AD轉換的部分代碼清單。
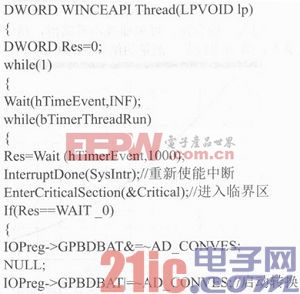
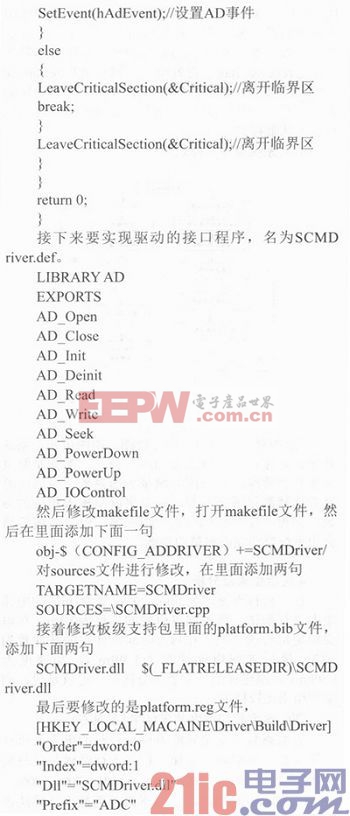
到此,驅動程序的所有工作都己完成,主控系統可以工作了。
3.2 下位機微控制系統程序設計
微控制系統的開發環境是Microchip MPLABIDE V8.0。系統上電進行初始化后,進入主程序中等待串口的中斷。上位機發送命令后,串口中斷子程序接收命令并存儲在command中,主程序判斷接收標志receive flag是否置位,然后解析command中的命令類型,進而執行相應的操作。等整個檢測完成之后,上位機會發來一個結束命令,此時下位機進入休眠模式。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理




評論