基于ARM11的電梯綜合檢測系統的研究

摘要:針對目前電梯檢測過程中工作量大、平衡系數難以測量、速度和加速度測量不精確以及測量時需攜帶大量的測量儀器等問題,提出了一種以嵌入式ARM11 S3C6410為核心、以Windows CE 6.0為操作系統并利用了霍爾傳感器和電流互感器等進行信號采集的電梯綜合檢測裝置。闡述了系統總計設計,實現了速度信號和電流信號的信號采集和處理,利用最小二乘法對測得的電流數據進行了擬合,基于MFC的方式實現了人機交互模塊并完成了其他主要功能模塊和驅動的開發。
關鍵詞:嵌入式系統;平衡系數;ARM11:電梯檢測
0 引言
隨著現代化城市的建設,電梯被廣泛運用于高層建筑中,電梯的安全性十分重要,作為電梯的重要參數,電梯的運行速度以及平衡系數影響著電梯的運行安全。本文針對目前在電梯檢測過程中存在平衡系數難以精確測量、電梯安裝人員專業技術較低、現場測繪作用工作量過大及電梯運行速度、加速度測試復雜且不精確等問題,提出了一款專門針對電梯平衡系數及速度、加速度的智能檢測系統。
本檢測系統采用了智能化設計,它基于32位的ARM處理器S3C6410,并采用了最新的Windows 6.0嵌入式操作系統,同時在外圍添加各種檢測裝置,通過最小二乘法等方法對數據進行擬合處理,最終實現在一臺檢測儀器上同時完成對電梯速度、加速度以及平衡系數的檢測。
1 系統總體設計
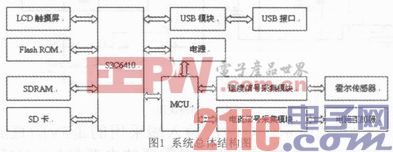
此系統的總體設計如圖1所示,電源模塊負責整個系統的電源供應,下位機MCU通過霍爾傳感器和電流互感器來分別采集速度信號和電流信號,并將采集到的信號傳送給上位機S3C6410。上位機負責數據處理和存儲,可以通過LCD觸摸屏來進行參數設置和檢測結果的讀取等。
2 系統硬件設計
系統硬件主要分為以ARM為核心的上位機部分和以MCU為核心的下位機部分。上位機中采用三星的S3C6410作為處理器,主要包括人機交互、存儲和無線通信模塊。下位機部分主要以PIC16F616為核心處理器,包括了速度信號采集和電流信號采集等模塊。
2.1 上位機部分硬件設計
2.1.1 系統顯示模塊
S3C6410是一款低功耗、高性價比、高性能的RISC處理器,內部已經集成了LCD控制器,支持TFT彩屏,本系統中采用的是東芝3.5寸的640×480的TFT LCD。Windows CE系統對不同型號的LCD顯示屏提供了驅動支持,能夠很好地支持各類嵌入式圖形軟件,且對觸摸屏有著良好的支持。
2.1.2 存儲模塊
本系統中的內存由256M的NAND Flash和2MBNOR Flash組成,用來完成對內核和文件系統以及Bootloader的存儲。同時,由于檢測的結果以及整個檢測過程都要記錄下來,選用了SanDisk的4G存儲卡作為外部存儲介質。
2.1.3 無線通信模塊
本系統選擇了目前業內處于領先水平的APC200A-43無線傳輸模塊。通過其自帶的軟件RFMagic可以很容易地對其進行設置,并完成所需要的功能。S3C6410和PIC16F616分別通過RS232串口與無線模塊進行連接,進而完成通信和數據傳輸。
2.1.4 電源模塊
本系統中共需要3種電壓模式,信號采集模塊的需要電壓為5V,APC200A-43無線傳輸模塊需要的電壓為3.3V,供給CPU的電源電壓則分別為3.3V和1.8V。
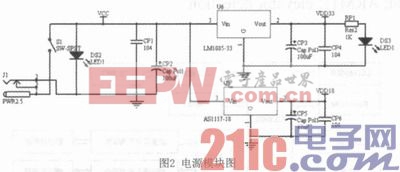
如圖2所示,電源的輸入端采用的是5V的直流電源供電,考慮到處理器中需要的電源包括3.3V和1.8V電壓,分別采用LM1085-3.3和AS1117-1.8V電源芯片進行電壓的轉換。
2.2 下位機部分硬件設計
2.2.1 速度信號采集模塊
本系統采用的霍爾元件來測量速度信號,傳感器為A44E,它是一種開關型元件,工作電壓范圍為4.5V-18V,能適應復雜的工作環境。
電梯運行主要是靠曳引機牽引的,因此,只要測得曳引機的轉速就能得到電梯的運行速度。測速的時候不能影響電梯的正常工作,否則測得的速度就會失去意義。在位于曳引輪轉動的軸上面固定一個120齒的帶磁性的磁鋼齒輪,這樣齒輪就會和曳引輪一起轉動,且具有相同的角速度。在正對齒輪的方向放置霍爾傳感器,如圖所示,這樣當齒輪轉動時,霍爾傳感器會感受到一個個脈沖,每轉過一個齒,就會產生一個脈沖,這樣根據脈沖數即可得到轉過的齒數,進而求得齒輪轉速。

根據霍爾傳感器的工作原理,設計一個預處理電路,通過信號的拾取電路、差動放大電路、濾波電路和TTL電平變換,將齒輪轉動產生的信號處理為標準的方波信號并將其輸送給PIC16F616。
設t時間內記得的脈沖數是m,也就是說在t時間內轉過的輪齒數是m,則齒輪轉動的角速度為
![]()
設曳引輪的半徑為R,即可求出電梯的運行速度
V=ωR
由上位機設定脈沖數n的值,當轉過第一個n時,記下時間t1,繼續轉到第二個n時,記下時間t2,t2是從第一個n結束時開始計時的,這樣求得這兩段的平均角速度ω1和ω2,進而求得電梯曳引輪的角加速度
![]()
最后得到電梯的加速度為α·R。
2.2.2 電流信號采集模塊
平衡系數是曳引式驅動電梯的重要性能指標,其實質是設計對重的質量大小,理想運行狀態是對重的質量正好等于轎廂自重加上轎內負載的質量。本系統中,電梯平衡系數是通過電流法進行測量,因此要測量不同負載時的電流。
電梯是一個很復雜的整體系統,在其正常運行時不能將其主線路切斷來測量運行時的電流,這樣也不切實際,因此,此處利用的是電流互感的原理來測量電流。

圖為電流采集模塊的電流互感器部分,使用時只需要將夾子打開,將待測量的線路夾在其中,即可引出電流信號,將引出的電流信號進行濾波放大后,進行AD轉換后傳送給下位機PIC16F616。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理




評論