汽車(chē)燈具道路照明仿真顯示
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
2.2 基于真實(shí)場(chǎng)景的模擬方法
基于真實(shí)場(chǎng)景的模擬方法是最近幾年隨著計(jì)算機(jī)圖形學(xué)和數(shù)碼技術(shù)的發(fā)展而形成的一種計(jì)算機(jī)輔助模擬方法。它的最大特點(diǎn)就是充分利用真實(shí)場(chǎng)景的作用而繞過(guò)反射系數(shù)之類(lèi)的棘手問(wèn)題。這種方法的關(guān)鍵就是需要得到一個(gè)比例關(guān)系數(shù)據(jù)庫(kù), 這個(gè)數(shù)據(jù)庫(kù)實(shí)際上就包括了吸收、反射、散射等復(fù)雜的光學(xué)過(guò)程。所以根據(jù)這個(gè)比例數(shù)據(jù)庫(kù), 就可以得到待測(cè)前照燈的照明效果模擬圖。采用這種方法的程序結(jié)構(gòu)如圖2 所示。
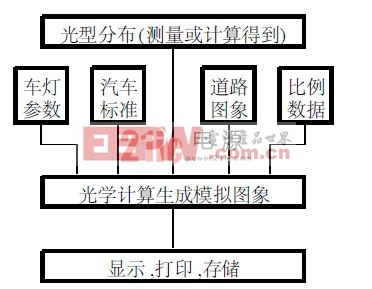
圖2 基于真實(shí)場(chǎng)景的模擬流程圖
基于真實(shí)場(chǎng)景的模擬方法的優(yōu)點(diǎn)如下:
a. 原理非常簡(jiǎn)單, 沒(méi)有涉及到復(fù)雜的光學(xué)轉(zhuǎn)換過(guò)程, 所以程序的結(jié)構(gòu)清楚, 設(shè)計(jì)也比較方便。
b. 可以模擬各種道路類(lèi)型(直道, 彎道, 交叉路口) 在不同狀況(晴天, 陰天, 霧天) 下的情況。
這種方法的缺點(diǎn)有:
a. 需要提前選擇標(biāo)準(zhǔn)道路并且用數(shù)碼相機(jī)進(jìn)行拍攝, 而且一旦拍攝完成之后, 整個(gè)道路及其附屬物體的位置和特性都固定下來(lái), 所以大大限制了模擬的靈活性。
b. 因?yàn)檫@種方法采用的是相對(duì)亮度, 所以只有當(dāng)兩個(gè)前照燈的光型分布相差很大的情況下才能在最終的模擬圖象中顯示出來(lái), 因此精度比較低。
3 應(yīng)用---AFS 系統(tǒng)
AFS 系統(tǒng)(Advanced Frontlight System) 又名智能化前方照明系統(tǒng), 是汽車(chē)照明的發(fā)展趨勢(shì), 一般都著重于強(qiáng)調(diào)它能提高行車(chē)的安全性。目前, 在汽車(chē)前照燈的標(biāo)準(zhǔn)方面存在兩種不同的標(biāo)準(zhǔn): 歐洲標(biāo)準(zhǔn)和美國(guó)標(biāo)準(zhǔn), 兩者主要在近光配光上有較大的差別。
歐洲標(biāo)準(zhǔn)特別注重對(duì)眩光的控制, 因此在其配光上存在15 度的截止線(xiàn), 并且照度也比較低。而在美國(guó), 道路大多比較寬闊, 因此對(duì)眩光沒(méi)什么特別的要求, 只要前照燈能夠照得更遠(yuǎn)更亮就可以了。但隨著經(jīng)濟(jì)全球化進(jìn)程的加快, 人們迫切要求消除這兩種標(biāo)準(zhǔn)之間的差別, 建立一個(gè)統(tǒng)一的國(guó)際標(biāo)準(zhǔn)。
一種方法就是將兩種標(biāo)準(zhǔn)中合理的部分綜合起來(lái)形成一個(gè)雙方都能接受的標(biāo)準(zhǔn), 這就是所謂的國(guó)際協(xié)調(diào)。另外一種方法就是建立一個(gè)包括多種功能的前照燈系統(tǒng), 它能根據(jù)不同的路況、天氣而采用不同的照明方式, 這就是AFS 系統(tǒng)。目前的AFS 系統(tǒng)包括以下一些功能: AL (不利天氣下的照明) , BL(彎道照明) , CL (鄉(xiāng)間道路照明) , TL (城鎮(zhèn)道路照明) , ML (高速公路照明) 和OVL (過(guò)頂信號(hào)照明) .經(jīng)過(guò)研究, 其中最有利和最需要的是AL , 其次是BL , 處于最后的是OVL , 所以, 在無(wú)法全部實(shí)現(xiàn)AFS 的功能時(shí), 可以有優(yōu)先選擇。利用汽車(chē)燈具道路照明仿真程序?qū)Ω鞣N汽車(chē)前照燈的照明效果進(jìn)行仿真模擬, 我們發(fā)現(xiàn)大多數(shù)前照燈都能滿(mǎn)足眩光方面的要求, 但是我們也發(fā)現(xiàn)在照度方面, 較遠(yuǎn)距離的照度能滿(mǎn)足要求, 但是在近距離上的照度不足。
汽車(chē)前照燈在這方面的缺陷在路況較好, 車(chē)輛不多的條件下沒(méi)有多大的問(wèn)題。但是在中國(guó)特別是一些大城市像上海, 道路比較窄且錯(cuò)綜復(fù)雜, 而且道路兩側(cè)還有自行車(chē)道和人行道, 因此就對(duì)近距離的照度有比較高的要求。這也就是為什么上海的許多司機(jī)總是在晚上將前照燈、位置燈、霧燈一起打開(kāi)的原因。
利用汽車(chē)燈具道路照明仿真程序我們可以模擬AFS 系統(tǒng)的眾多功能的照明效果, 并且比較是否有一種功能或者幾種功能的綜合能否滿(mǎn)足近距離照度高的要求。如果有, 那么可以不用對(duì)現(xiàn)有的AFS 系統(tǒng)進(jìn)行修改。如果沒(méi)有, 就需要向現(xiàn)有的AFS 系統(tǒng)中加入一項(xiàng)功能, 使之能夠提高近距離照度。那么這樣改進(jìn)的AFS 系統(tǒng)就可以適用于中國(guó)特殊的情況了。
摘 要: 隨著計(jì)算機(jī)圖形學(xué)和計(jì)算機(jī)CAD 技術(shù)的發(fā)展, 人們開(kāi)發(fā)了汽車(chē)燈具道路照明仿真程序來(lái)模擬汽車(chē)前照燈在真實(shí)場(chǎng)景中的照明效果。本文介紹了兩種方法: 基于反射系數(shù)的模擬和基于真實(shí)場(chǎng)景的模擬。最后, 本文還探討了該模擬軟件在改進(jìn)AFS 系統(tǒng)中的應(yīng)用。
1 介紹
近些年, 在汽車(chē)前照燈的生產(chǎn)技術(shù)和流程方面出現(xiàn)了許多重大的進(jìn)展, 這使得汽車(chē)前照燈的性能得到大大的提高。其中最顯著的就是在新材料和生產(chǎn)工藝方面的進(jìn)展使得汽車(chē)前照燈的設(shè)計(jì)更加靈活。
如反射器, 已不僅僅限于簡(jiǎn)單的拋物面反射器, 更加復(fù)雜的反射器(如自由曲面反射器) 也開(kāi)始應(yīng)用到汽車(chē)前照燈系統(tǒng)中。然而, 復(fù)雜的系統(tǒng)所需要的設(shè)計(jì)周期也變長(zhǎng), 這在現(xiàn)代化大生產(chǎn)中是不允許的。
因此如何在盡量縮短設(shè)計(jì)周期的前提下設(shè)計(jì)出性能優(yōu)越的汽車(chē)前照燈就成為一個(gè)迫切需要解決的問(wèn)題。
計(jì)算機(jī)輔助設(shè)計(jì)軟件(Computer Aided Design Soft2ware) 就是解決這個(gè)問(wèn)題的一個(gè)有效的工具。
一般的汽車(chē)前照燈的計(jì)算機(jī)輔助設(shè)計(jì)軟件的輸出結(jié)果都是25m 測(cè)試屏上的等照度曲線(xiàn)。雖然通過(guò)等照度曲線(xiàn)設(shè)計(jì)人員可以獲得前照燈光型分布的信息, 但是它并不能回答這樣一個(gè)問(wèn)題: 此光型分布在真實(shí)的道路場(chǎng)景上的效果如何? 為此, 人們開(kāi)發(fā)出一種汽車(chē)燈具道路照明仿真程序, 它能夠?qū)⑶罢諢舻墓庑娃D(zhuǎn)化為模擬的道路場(chǎng)景。通過(guò)前照燈的光型仿真顯示, 一方面對(duì)于設(shè)計(jì)人員和生產(chǎn)廠家而言,可以盡早檢查, 修改設(shè)計(jì)方案, 而不需要等生產(chǎn)出原型后再修改, 從而大大縮短了設(shè)計(jì)的時(shí)間和費(fèi)用;另一方面, 對(duì)于一般客戶(hù)而言, 可以很直觀地知道所需要的前照燈的照明效果, 而不需要制造模型。
2 兩種方法
在汽車(chē)燈具道路照明仿真程序中一般使用兩種不同的方法: 基于反射系數(shù)的模擬和基于真實(shí)場(chǎng)景的模擬。
2.1 基于反射系數(shù)的模擬方法
基于反射系數(shù)的模擬方法以計(jì)算前照燈的光型分布為基礎(chǔ), 然后根據(jù)路面以及路上各種物體的反射系數(shù)得到前照燈的模擬效果。基于反射系數(shù)的模擬方法的流程見(jiàn)圖1.

圖1 基于反射系數(shù)的模擬流程圖
首先, 在計(jì)算機(jī)中建立道路的幾何模型。道路的幾何模型可以是預(yù)先存在程序的數(shù)據(jù)庫(kù)中的。程序可以根據(jù)用戶(hù)所要求的道路參數(shù)(道路的寬度,路面的反射特性, 周?chē)奈矬w如樹(shù)木、信號(hào)標(biāo)志、彎道等等) 來(lái)查找數(shù)據(jù)庫(kù), 找到最接近的模型作為道路的基本模型。道路的幾何模型還可以由用戶(hù)自己定義。首先用戶(hù)可以根據(jù)預(yù)先決定的道路類(lèi)型(鄉(xiāng)間道路, 城市道路, 高速公路等) 從數(shù)據(jù)庫(kù)中調(diào)入基本的模型, 然后可以任意安排各種路面上的物體, 包括樹(shù)木、行人、交通信號(hào)標(biāo)志、彎道標(biāo)志以及過(guò)頂信號(hào)標(biāo)志。用戶(hù)還可以在虛擬路面上放置迎面車(chē)輛或者前面車(chē)輛來(lái)模擬交車(chē)或超車(chē)時(shí)的情景。
然后用戶(hù)可以決定道路的狀況(是濕路面還是干路面) , 天氣情況(晴天, 陰天, 雨天還是霧天) .根據(jù)這些條件, 上面安排的物體(包括路面本身) 的特性包括反射系數(shù)、顏色都可以從數(shù)據(jù)庫(kù)中查到。
最后用戶(hù)可以決定觀察的角度(鳥(niǎo)瞰圖, 駕駛員的角度或者用戶(hù)自己定義的角度) .這樣我們就在計(jì)算機(jī)中建立了一個(gè)完整的道路模型, 它是進(jìn)行模擬的基礎(chǔ)。
然后, 定義汽車(chē)光源模型。光源模型可以是自己通過(guò)黑體輻射原理計(jì)算的, 也可以是其他程序的輸出結(jié)果。在這個(gè)階段, 用戶(hù)可以決定車(chē)燈的位置以及觀察者的位置。程序還可以根據(jù)光源模型以及反射器和配光鏡的類(lèi)型計(jì)算25m 測(cè)試屏上的光型分布, 作為專(zhuān)業(yè)設(shè)計(jì)人員的參考。最后就是亮度模擬。
在定義了道路的各種參數(shù)特性和車(chē)燈的光型分布之后, 就可以進(jìn)行亮度模擬了。亮度模擬的傳統(tǒng)方法就是使用蒙特卡羅光線(xiàn)追蹤法。現(xiàn)在, 許多程序也采用基于能量傳輸?shù)墓馔ㄞD(zhuǎn)移方法來(lái)進(jìn)行亮度模擬。
但是兩種方法都必須知道路面和物體上各點(diǎn)在光線(xiàn)入射角度上的反射系數(shù)。亮度模擬的結(jié)果就是路面和物體上每一點(diǎn)的精確的亮度數(shù)值, 這些亮度數(shù)值可以轉(zhuǎn)化為計(jì)算機(jī)顯示屏上的灰度。于是最終就可以在顯示屏上得到所定義的車(chē)燈光型分布在虛擬道路上的照明效果。





評(píng)論