功率穩定可調LD驅動電路的設計

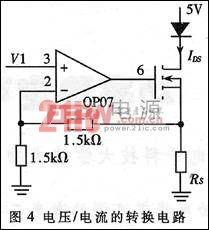
由上述可見,驅動電流由V1及小電阻Rs決定。在實際中取Rs為30Ω的高精度電阻,則由上式可得滿量程電流為150mA。由于LD正常工作時,其壓降為2V左右,所以這樣設計驅動電流最大值不會超過100mA,對LD可以起到保護作用。故驅動電流在0~100mA之間可調。由上式可見,最大驅動電流可以通過調節Rs的大小來得到,設計靈活性較大。
此外 ,電路中單片機與計算機間通過RS232串行口進行通信,采用的RS232收發器為MAX3232。計算機通過串口可對LD的初始驅動電流、參考監測電壓進行設置,還可以對PID數字調節器的比例、積分、微分系數進行設定,這樣可以方便快捷地整定出調節器的參數。存儲器中存放一些設定參數以及暫存PID運算的中間結果。
數字PID調節
PID調節器控制結構簡單,參數容易調整,不必求出被控對象的數字模型便可調節。其輸入e(t)與輸出u(t)間的關系為:

為了實現編程,將上式寫成離散化,可寫出第k次采樣式PID的輸出表達為:

式中,E(k)為第k次采樣式的偏差值。設監測電壓設定值為V0set,差分放大器第k次輸出的采樣值為Vo(k),則:
E(k)=Voset-Vo(k) (5)
為程序設計方便,將式(4)作進一步改進,設比例輸出為:Up(k)=KpE(k),積分項輸出為:Ui(k)=K1E(k)+P1(k-1),微分項輸出為:UD(k)=Kd[E(k)-E(k-1)],那么式(4)可寫成:
U(k)=U p(k)+Ui(k)+UD(k) (6)
式(6)即為離散化的位置型PID編程方式,一般采用浮點運算。當Kp、KI、KD分別給出且存放在指不定期的內部RAM中時,則完成式(6)位置型浮點運算PID運算程序的流程圖如圖5所示(初始化程序設置初值使E(k-1)=UI(k-1)=0)。

在PID三種作用中,比例作用可對偏差作出及時響應;積分作用主要用來消除靜差,改善系統的靜態特性;身分作用主要用來減少超調,克服振蕩,使系統趨向穩定,加快系統的動作速度,減少超調時間,改善系統的動態特性。若能將三種作用的強度配合適當,可以使控制器快速、平穩、準確,從而獲得滿意的控制效果。PID調節器的參數整定可以使用擴充臨界比例度法。
該設計將經典PID控制理論融入激光二極管功率控制中,采用數字調節方式,初始驅動電流(LD輸出功率)可設置,最小電流可調量小,調節精度高,最大驅動電流可變。將該驅動電路與溫度控制電路配合使用(LD的閾值電流和輸出功率受工作溫度的影響較大),可使激光二極管輸出功率高度穩定且可調。

電子鎮流器相關文章:電子鎮流器工作原理




評論