基于單片機的真空冷凍干燥試驗儀溫度控制器設計

關鍵字:溫度/單片機/PT100/MC14433
1 引言
真空冷凍干燥技術在低壓、真空的條件下使物料水分升華,是干燥技術領域中科技含量高、涉及知識面廣的一種技術,由于其干燥產品具有復水性能佳、色澤保持好、營養成分損失少、產品重量輕、便于攜帶運輸、易于長期保存等優點,在品質上遠優于其它干燥制品,使其成為干燥技術研究和發展的前沿。
真空冷凍干燥技術對于不同的應用場合有不同的試驗及溫度要求。本系統試驗對象為某種生物材料,采用液態氮作為冷卻液,要求溫度的控制設定值為-60℃,溫度的最小分辨率為0.5℃,偏差要求≤2℃。要求能實時顯示當前與設定的溫度值,并且可通過鍵盤調整設定溫度值。
硬件系統采用atmel公司的at89c52單片機為控制核心,其內部含有8kb的e2prom和256b的ram,能滿足一般需求,而無需擴展外部程序存儲器,系統時鐘采用12mhz。控制器的主要硬件結構框圖如圖1所示。
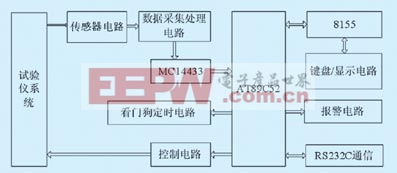
圖1 控制器的硬件結構
2.1 溫度傳感器電路
考慮要求的控制精度較高,溫度傳感器選用pt100型鉑熱電阻溫度傳感器。pt100測溫精度高、穩定性好,非常適合-200~+650℃溫度范圍的精確測量,由于傳感器電阻rt和溫度t之間的關系是非線性的,為消除非線性對測溫精度的影響,設計非線性的校正電路,且考慮采用四線制接法來消除引線電阻的影響。如圖2所示,圖中互導放大器的互導為g,可以使輸出帶電壓得到一個1/(1-grt)的比例系數,適當的選取g值就可以將非線性誤差降到一個很小的范圍內。g值可以通過校正試驗來確定,本設計中通過試測取g=0.38ma/v,測量誤差可達到小于0.1℃的精度。
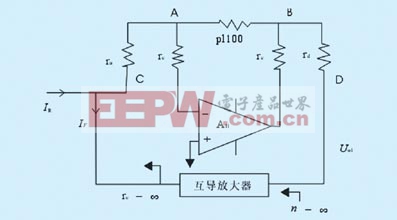
圖2 pt100溫度變送器模型電路
圖2中,4根導線的電阻為ra,rb,rc,rd。則rb可以看作是a1差模輸入阻抗的一部分,而rc可看作是a1輸出阻抗的一部分。閉環后,rb和rc的影響均可消除。采用電壓緩沖器,使從d點向左方看進去的輸入阻抗ri為極大,又采用電流源電路使從c點向左方向看進去的輸出阻抗rd為極大,這樣就消除了引線電阻對測溫的影響。
2.2 a/d轉換
由于真空干燥試驗儀是液氮傳導輻射冷卻,是典型的大滯后的溫度系統,同時試驗要求有很高的精度控制要求,所以選用雙積分型的a/d轉換器,雙積分型由于兩次積分的時間比較長,所以a/d轉換速度慢,但精度很高,而且對周期變化的干擾信號積分為零,抗干擾性能很好。十分適合本系統所面對的控制狀況。
選用![]() 位雙積分a/d轉換器mc14433(精度相當于11位二進制數),具有精度高,抗干擾性能好等優點,速度約為1~10次/s,mc14433 a/d轉換器的被轉換電壓量程為199.9mv。轉換完后以bcd碼的形式分4次送出。mc14433電路結構圖如圖3所示。
位雙積分a/d轉換器mc14433(精度相當于11位二進制數),具有精度高,抗干擾性能好等優點,速度約為1~10次/s,mc14433 a/d轉換器的被轉換電壓量程為199.9mv。轉換完后以bcd碼的形式分4次送出。mc14433電路結構圖如圖3所示。
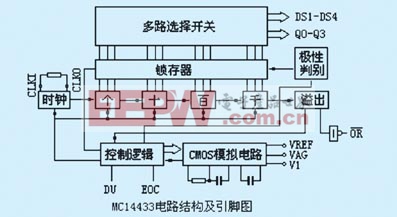
圖3 mc14433電路結構圖
mc14433的a/d轉換結果是動態分時輸出的bcd碼,q3~q0為千、百、十、個位bcd碼,而ds1~ds4引腳輸出分別為千、百、十、個位的選通信號。
圖4中mc14433為+2.5v精密集成電壓基準源,經電位器分壓后作為a/d轉換用基準電壓。du端與eoc端相連,即選擇連續轉換方式,每次轉換結果都送至輸出寄存器。eoc是a/d轉換結束的輸出標志信號。at89c52讀取轉換結果采用中斷方式。

圖4 mc14433與at89c52連接的硬件接口
2.3 鍵盤/顯示系統設計
顯示功能和輸入功能是單片機系統的人機接口,是其最基本的組成部分。由于單片機at89c52本身的i/o口數量有限,同時要考慮必須的數據總線和地址總線,因此i/o口資源緊張,要實現顯示和輸入功能必須擴展i/o口。常用的i/o擴展芯片有ttl、cmos鎖存器、緩沖器芯片和8255a、8155等,考慮到系統擴展對整個系統的穩定性和運行效率的影響,選用8155進行擴展,選用共陰極led數碼管顯示溫度,實現實測溫度的實時顯示,同時能顯示初始設定溫度值。設定溫度值由鍵盤中斷輸入,并實時顯示。
2.4 通訊系統設計
單片機系統需要和上位pc機進行通訊。選用較為普及的串行通訊。串行通訊分為同步通訊和異步通訊兩種通訊方式。由于同步通訊方式對通訊雙方的時鐘頻率要求相同,而對于單片機和pc機之間難以保證這一點,因此系統通信采用異步通訊方式。另外pc機串口的電平為rs-232電平,而mcs-51單片機串口的電平是ttl電平,要想實現兩者之間的通信,需要在它們之間加電平轉換電路,使用中很不方便。故使用max232代替。pc機串行口與單片機之間的連接方式一般為3線零moderm方式,即只采txd、rxd和gnd等3根基本的數據線直接相連。單片機將實時采集轉換的溫度送顯示的同時,每隔5分鐘將當前溫度值送pc機存儲,提供打印溫度變化曲線。作為擴展,設置并且可以由pc機發送初始設定溫度,由單片機接收顯示。
2.5 輸出控制及報警
單片機的輸出控制電機工作,為避免強干擾,選用帶有光電隔離功能的晶閘管mc3041。另外,為了保證制件質量,在電路設計中考慮到加設報警電路,當溫度低于-80℃時,綠色發光二極管被點亮;當溫度高于-30℃時,紅色發光二極管被點亮。
2.6 系統抗干擾設計
抗干擾技術主要是硬件和軟件上的抗干擾技術,在硬件上采用良好的接地,選用合適的元器件等方面。本系統在充分考慮硬件上的抗干擾后,設計了一系列軟件抗干擾措施:(1)在傳感器數據采集處理上,采用中值法數字濾波;(2)設置軟件陷阱,用引導指令強行將捕獲到的亂飛程序引向復位入口地址,在此處將程序轉向專門對程序出錯進行處理的程序,使程序納入正軌。(3)“看門狗”技術:采用程序監視技術,又稱“看門狗”技術(watch-dog),避免程序進入“死循環”。“看門狗”不斷監視程序循環運行時間,若發現時間超過已知的設定時間,則認為系統陷入了“死循環”,然后強迫程序返回到0000h入口,在0000h處安排一段出錯處理程序,使系統運行納入正軌。設計2個定時器,一個為短定時器,一個為長定時器,并各自獨立,短定時器像典型看門狗一樣工作,它保證一般情況下看門狗有快的反應速度,長定時器近定時大于cpu執行一個主循環程序的時間,用來防止看門失效。
3 控制算法設計
根據本系統的溫度控制精度≤0.5℃,并考慮誤差積累對控制系統的影響,選用增量式pid控制算法,即指單片機數字控制器的輸出只是控制量的增量![]() ,其控制算式為:
,其控制算式為:
![]()
(1)式中:![]() 、
、![]() 、
、![]() 分別為比例、積分、微分系數;
分別為比例、積分、微分系數;![]() 為基本偏差,表示當前測量值和設定目標間的差。
為基本偏差,表示當前測量值和設定目標間的差。
![]()
該算法的優點有:(1)計算機輸出增量,所以誤動作比較小。(2)算式中不需要累加,控制增量![]() 的確定僅與最近的3次(系統采用恒定的采樣周期時,k取3次)的采樣值有關,因而比較容易通過加權處理而獲得比較好的控制效果。
的確定僅與最近的3次(系統采用恒定的采樣周期時,k取3次)的采樣值有關,因而比較容易通過加權處理而獲得比較好的控制效果。
4 系統軟件設計
系統軟件設計采用模塊化設計方法,由主程序模塊,功能實現模塊和運算控制模塊等三大模塊組成。
4.1 主程序模塊
在程序中首先給定pid算法的參數值,然后通過循環顯示當前溫度,以等待中斷,并且設定鍵盤外部中斷為高優先級,使主程序能實時響應鍵盤處理,軟件設定定時器t0為10s定時,在無按鍵時,應每隔10s響應1次,用來采集溫度傳感器經a/d轉換的溫度信號。設置定時器t1為t0的嵌套中斷,初值由pid算法子程序來提供。用來執行對電機控制以及報警電路等。流程圖如圖5所示。

圖5 主程序流程圖
4.2 功能實現模塊
功能實現模塊主要由a/d轉換子程序、中斷處理子程序、鍵盤處理子程序和顯示子程序等組成。其中主要的中斷子程序為:(1)t0中斷子程序 由于溫度變化的滯后性,單片機內部設定8s定時中斷,低優先級,在該中斷響應時,單片機完成以下工作:a/d轉換和數據采集、數字濾波、判斷溫度是否超出范圍、顯示溫度、計算溫度偏差、調用增量pid算法并輸出控制量。(2)t1中斷子程序t1定時中斷嵌套在t0中斷之中,為高優先級中斷。t1的定時初值由pid算法子程序提供,t的中斷響應時間用于輸出對電機的控制信號。
4.3 運算控制模塊
子程序框圖如圖6所示。主要完成增量式pid算法的運算,計算出輸出控制增量,并根據輸出控制增量△u(k)設定t1的定時值,控制電機的動作。

圖6 子程序流程圖
5 結束語
經試驗運行,該系統能基本可靠運行,配合軟件算法設計,可有效解決溫度大滯后控制精度不精確的問題,顯著提高溫度測量結果精度,并可避免因控制電機執行機構滯后、過量執行而影響測量準確性,從而能嬌好的完成試驗目的。

pid控制器相關文章:pid控制器原理










評論