懸掛運動控制系統設計

引言
在現代的工業控制、車輛運動和醫療設備等系統中, 懸掛運動系統的應用越來越多,在這些系統中懸掛運動部件通常是具體的執行機構 , 因而懸掛部件的運動精確性是整個系統工作效能的決定因素, 而在實際中實現懸掛運動控制系統的精確控制是非常困難的。
我們采用 AT8 9 5 l單片機和步進電動機設計了懸掛運動控制系統, 由單片機產生脈沖信號驅動有精確步距的步進電動機, 電機帶動懸掛部件在平面上做特定的準確運動。
系統的硬件設計與實現
本系統硬件可分為控制部分、電動機驅動部分、鍵盤輸入部分和顯示 部分 。
1、控制部分系統的控制部分為單片機最小系統, 單片機采用 ATME L公司的 AT8 9 C5 1芯片, 因為作為系統控制芯片, AT8 9系列算術運算功能強 , 可以用不同的語言軟件編程( 如 c語言、匯編語言) , 編程簡單 , 易于實現控制要求和控制算法 , 并且AT8 9 C 5 1 芯片具有體積小 , 功耗較低, 成本低 , 程序寫入簡單方便等優點。
2、驅動部分為實現硬件上對步進電動機的精確驅動 ,我們采用 2個高性能細分 S M一 2 0 2 A驅動控制器, 該控制器采用新型的雙極性橫流斬波技術, 輸入頻率寬, 所以電動機運行精度高, 振動小, 噪聲低, 運行過程中比較平穩 , 適合驅動中小型的任何兩相或四相混合式步進電機。而且在該驅動器還標明了各個按鍵開合時所對應的電流、驅動器的靜轉矩和步矩角 , 這給電動機在實際工作的過程中提供 r很大的方便。
3、數碼管顯示電路設計用單片機的P E l 和P 口來控制數碼管的顯示, P 口作為數碼管的選通端 , P 口_ l 乍為輸出端, 將設定點的坐標從數碼管上顯示出來。通過數碼管顯示, 可以將輸入坐標顯示 求 ,以防 止輸入數據出錯產生不必要的麻煩。
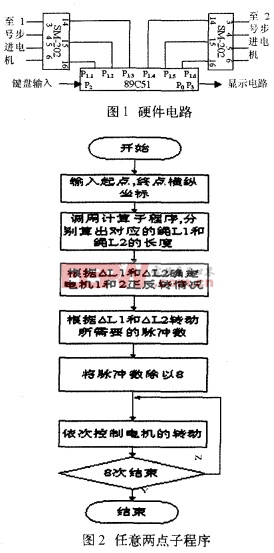
硬件電路如圖 l 示意。用 P 和 P 作為脈沖波的輸 端 口, 接任 S M 一2 0 2的脈沖信號端端) , 用 P 和P 作為電動機運行方向的控制端 , 通過軟件設定一個位置 , 在物體到達該化置的時候電動機的運行方向改變。p. 和作為驅動器使用, 可以控制電動機的狀態, 在物體到達一定的地點時使電動機 白鎖。使用.。 和 P. 作為電動機轉動的顯示標志 , 通過和P 與發光二極管相連 , 電動機轉動時卡 醍 管發光, 停止時二卡 眨 管熄滅。用 P , 口作為鍵盤的輸入口, 其中低四位為行, 高四位為列,利用掃描鍵盤法來確定按下的鍵 , 從而設定坐標點的參數。
系統軟件設計采用的步進 電動 機是永磁式步進 電機, 這種電動機是兩相混合 的 , 當定子控制繞組按照一定順序不斷地輪流通電時, 步進電機就持續不斷地旋轉 , 電機的轉速與輸入電壓 外界溫度和負載無關。當相數步距角設定時, 其轉速僅于輸入脈沖的頻率成正比, 改變脈沖頻率就可以實現轉速 , 因此可以很容易的控制步進電機在某一固定平面上的運動軌跡和路程。當控制脈沖停止輸入,讓最后一個脈沖控制繞組繼續通人直流時, 電動機可以固定在一個位置上, 這樣可以實現物體運動后在平面上相應點的停止。 此簡單介紹以電機帶動物體在畫板平面上在任意兩點『 日 】 運動和畫圓( 圓周) 運動的軟件設計 。











評論