基于嵌入式微處理器的張力控制器

2.1 傳感器信號接口電路
若傳感器輸為標準信號形式,即為DC4-20mA, 或電壓信號DC0-10V/0-5V. 接口電路形式較為簡單。在此主要對采用稱重法的應變片傳感器電路進行說明。
應變片組成的橋路,有恒壓供電和恒流供電兩種形式。設計采用恒流供電形式,如圖2所示,恒流電路采用OP07運算放大器完成。運算放大器同相端接2V穩壓管,這樣,加在運算放大器H0U0反相端電阻H0R2(69Ω)上的電壓也為2V, 因此,流過電阻H0R2上的電流,不因負載變化而變化,從而形成恒流供電。在收放卷過程中,因張力變化引起橋路不平衡將有電壓信號輸出。輸出的電壓信號經儀表放大器AD623放大后,傳送至MPU的A/D轉換器。圖2中H0W1為增益調整電位器,H0W0為零點電平調整電位器。
2.2 磁粉制動器恒流控制電路
磁粉制動器的轉矩與激磁電流的大小基本成線性關系,改變激磁電流可以調節轉矩大小。因此對磁粉制動器的控制主要是根據張力大小輸出相應的恒定電流。系統利用C8051F350可編程計數陣列(PCA)的脈寬調制(PWM)功能作為D/A信號輸出。如圖3所示, MPU將PWM信號送至7U1光藕隔離輸出,信號經非門傳遞至由7R3和7C1組成的濾波電路,將PWM信號變為0-2V的直流信號, 送至運算放大器7U3A的同相端。由放大器性質可知,取樣電阻7R4上所加的電壓為控制直流信號電壓0-2V, 從而形成恒流加在磁粉制動器上。若取樣電阻7R4為1Ω,則最大可控電流范圍為0-2A(為避免過熱,取樣電
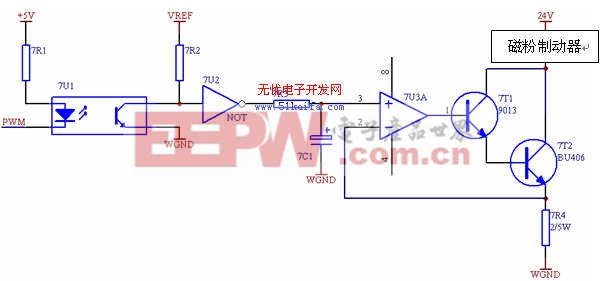
圖3 磁粉制動器恒流控制電路
Fig. 3 Magnetic powder brake constant current control circuit
磁粉制動器
阻的選擇應考慮其散熱功率).
張力控制器除了兩路傳感器信號輸入電路和磁粉制動器恒流控制輸出電路外,還采用三線串行接口DM12864M 圖形點陣液晶屏進行控制參數、設置參數及出錯報警信息的顯示。顯示內容包括:設定張力值、實測張力值、磁粉制動器控制電流大小及張力控制器運行狀態(手動、自動及參數設置狀態)等內容。設置參數包括:控制比例大小、積分大小、控制周期和相位等內容。并通過5個按鍵進行參數設置和其它運行操作等。其電路原理如圖4所示。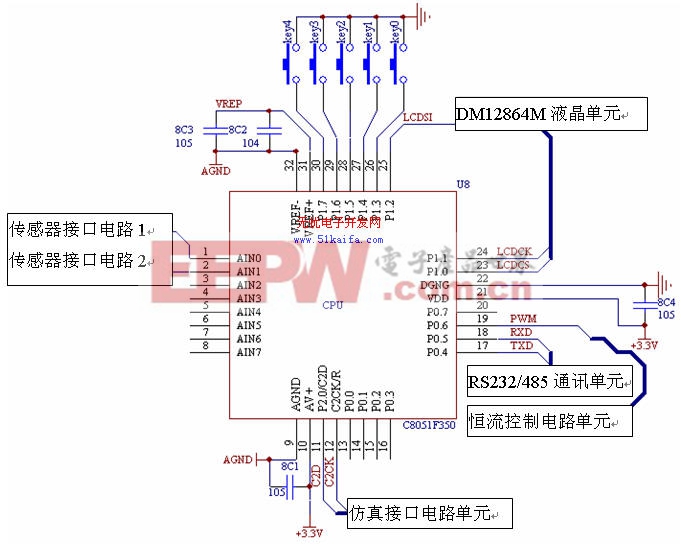
圖4 張力控制器電路原理
linux操作系統文章專題:linux操作系統詳解(linux不再難懂) 稱重傳感器相關文章:稱重傳感器原理






評論