基于Small RTOS51的多任務串行通信研究

引 言
在簡單的單片機應用系統中,前/后臺系統被廣泛應用。其中應用程序是一個無限循環,循環中調用相應的函數完成相應的操作。這部分可以看作后臺行為,也稱為任務級;中斷服務程序處理異步事件,可以看作前臺,也叫中斷級,時間相關性很強的操作靠中斷服務程序來保證。中斷服務程序提供的信息一直要等到后臺程序運行到該處理這個信息時才能得到處理,最壞情況下,響應時間等于整個循環的執行時間。隨著單片機應用系統的復雜化,前/后臺系統已不能滿足系統實時性的要求,這就需要一個嵌入式的實時操作系統來管理和協調多個任務和中斷。
目前在單片機上運行的實時多任務操作系統主要有μC/OS、RTX51 Full和RTX51 Tiny。μC/OS是Jean J.Labrosse先生編寫的源碼開放的實時內核,可適用于8/16/32位的單片機、ARM和DSP等微控制器和微處理器,在諸多領域得到廣泛應用。但是μC/Os實時操作系統規模較大,相對于處理能力有限的單片機來說有些勉強,并且大多需要外擴RAM運行,這給應用系統軟硬件設計都帶來不便。 RTX51是德國Keil公司開發的一種小型的專門應用于McS-51系列單片機的實時多任務操作系統,它有RTX51 Full和RTX51 Tiny兩個版本。RTX51 Full無源碼,自身代碼有6 KB多,運行時需要大量的外部RAM,不利于學習和使用;RTX51 Tiny較為簡單,但是任務沒有優先級和中斷管理,很多時候并不實用。SmallRTOS51是陳明計先生為51系列單片機編寫的源碼公開的實時操作系統,支持任務優先級和中斷管理,RAM需求量小,非常適合在單片機上運行。本文將在簡要介紹Small RTOS51實時操作系統的基礎上,結合具體應用實例詳細說明Small RTOS51環境下的多任務串行通信。
1 Small RTOS51簡介
Small RTOS51嵌入式實時操作系統具有以下特點:
①公開源代碼,任何人都可以免費獲取。
②可移植、可固化,雖然是為51系列單片機編寫,但是比較容易移植到其他MECU上,并可以固化到產品中,成為產品的一部分。
③占先式,支持16個優先級不同的用戶任務以搶占式運行。
④中斷管理,系統支持中斷管理功能,中斷嵌套層數可達255層。
⑤RAM需求量小,Small RTOS51為小RAM系統設計,128個RAM單元就可以運行。通常單片機不需要外擴RAM就能運行Small RTOS51實時操作系統。
下面簡要介紹Small RTOS51的任務管理和任務間的通信與同步。
1.1 Small RTOS51的任務管理
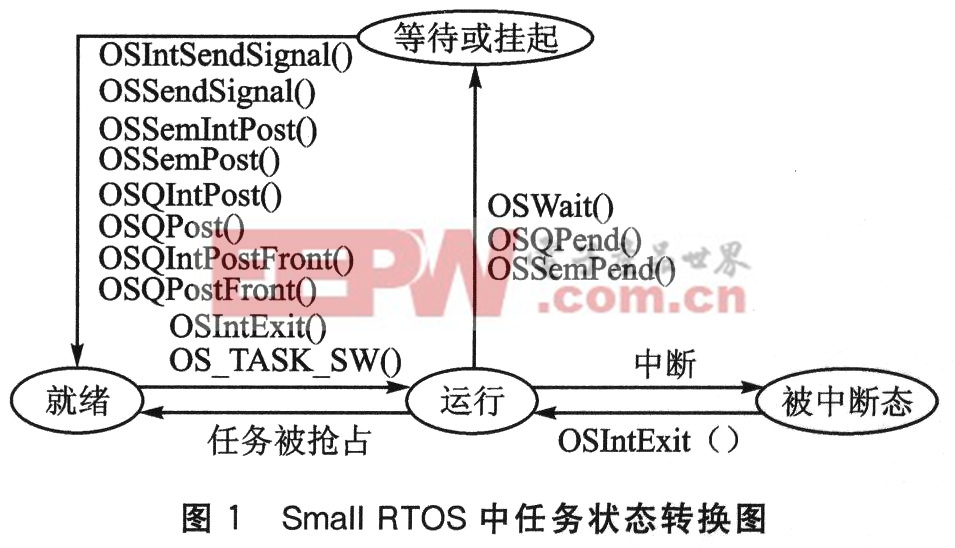
Small RTOS51實時操作系統中,任務必須是一個無限循環,每個任務必須賦予不同的優先級,優先級數值越小,優先級越高。在任意時刻,任務的狀態必處于以下4種狀態之一:
①運行,任務獲得CPU后開始執行;
②就緒,任務只等待系統分配CPU資源;
③等待或掛起,任務因等待時隙、信號量或者消息等資源而被阻塞;
④被中斷態,發生中斷時,CPU提供相應中斷服務,原來正在運行的任務暫不能運行,就進入了被中斷態。
系統中任務狀態的轉換關系如圖1所示。
1.2 Small RTOS51中任務間的通信與同步
Small RTOS51中,任務間的通信與同步主要有兩種方式:信號量和消息隊列。
信號量由兩部分組成:一個是信號量的計數值,它是一個8位無符號的整數;另一個是由等待該信號量的任務組成的等待任務表,所有對信號量的訪問都必須通過信號量索引來實現。信號量索引是一個0到OS_MAX_SEMS-1的數值,其中OS_MAX_SEMS為用戶自定義的最大信號量數目。
消息隊列實際上是一個8位無符號的字節變量數組。向隊列發送一個消息,實質上是將O~255之間的一個數值存儲到消息隊列中;從消息隊列中獲得一個消息就是獲取一個O~255之間的數值。
2 多任務串行通信研究
下面以一個應用實例詳細說明Small RTOS51環境下包含多任務的串行通信,該應用的硬件設計以NXP公司的P89V51RD2單片機為核心,包含了鍵盤電路、看門狗電路和顯示電路等幾個部分。硬件設計簡圖如圖2所示,主要完成以下功能:從串口接收數據,經P89V51RD2單片機處理,并通過I2C總線輸出到由LED發光二極管與 8574T組成的顯示電路,由P89V51RD2掃描鍵盤,檢測到按鍵被按下時,進行相應的處理并生成一串命令數據通過串口向遠端發送。








評論