4 系統檢測
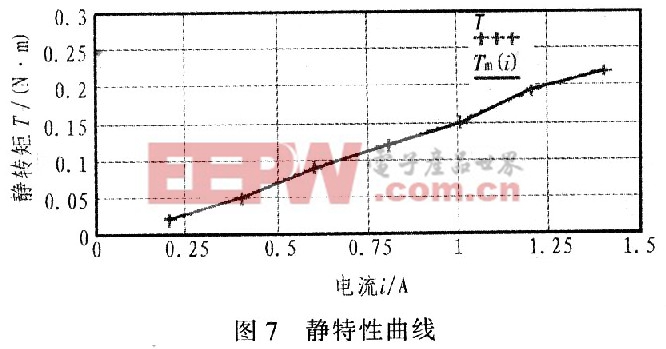
為檢驗該控制系統的實際工作情況,在給定PMM2101輸出工作電流的狀態下采用能量轉化法測得步進電機輸出的最大靜轉矩。選取輸出電流間隔0.2 A,測到步進電機最大靜轉矩與電流之間關系的靜特性曲線,如圖7所示,說明該控制系統設計較合理。
5 結論
該系統通過MSP430單片機控制步進電機運轉情況,可靠性高,在電機運行時能夠方便設定步進電機的啟/停、轉速和方向,提高步進電機的步進精度;能夠控制三相或四相步進電機;由PC上位機完全控制步進電機的各種運行方式,使系統能夠應用于惡劣環境中,保證人員安全,適用范圍較廣,且電路簡單,成本較低,控制方便,移植性強,實用價值高。













評論