直流電機位置伺服系統驅動器設計

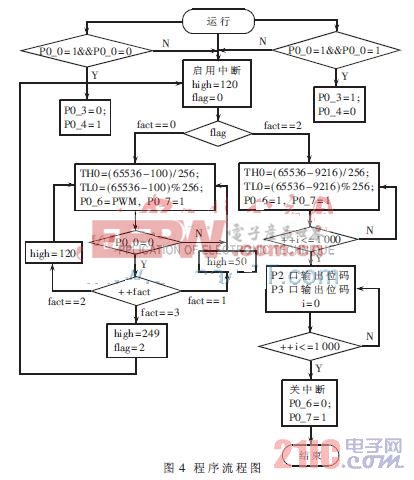
3.2 程序流程圖
程序流程圖如圖4所示。本文引用地址:http://www.104case.com/article/172962.htm
4 方案二的設計
方案二設計的光電電動小車能夠實時顯示時間、速度、里程,具有自動尋跡、避障功能,可程控行駛速度、準確定位停車。
4.1 系統整體設計
方案二同樣采用80C51單片機進行智能控制。開始由手動啟動小車并復位,當經過規定的起始黑線,由超聲波傳感器和紅外光電傳感器檢測,通過單片機控制小車開始記數顯示并避障、調速;系統的自動避障功能通過超聲波傳感器正前方檢測和紅外光電傳感器左右側檢測,由單片機控制實現;在電動車行駛過程中,采用雙極式H型PWM脈寬調制技術,以提高系統的靜動態性能;采用動態共陰顯示行駛時間和里程。
4.2 主要分電路設計
4.2.1 調速電路
方案二也采用雙極式H型變換器,它是由4個三極電力晶體管和4個續流二極管組成的橋式電路。
4.2.2檢測電路設計
檢測系統主要實現光電檢測,即利用各種傳感器對電動車的避障、位置、行車狀態進行測量。
由于紅外檢測具有反應速度快、定位精度高、可靠性強以及可見光傳感器所不能比擬的優點,故采用紅外光電碼盤測速方案。具體電路圖略。
4.3. 顯示電路
本設計中用兩片4位八段數碼管gem4561ae作顯示器,并具有雙重功能,在小車不行駛時其中一片顯示年p月,另一片顯示時p分; 當小車行駛時,分別顯示時間和行駛距離。
本設計中采用新型芯片EM78P458作為顯示驅動器,用單片機的并行口控制,一個數碼顯示電路用4個口線,用專用驅動芯片控制可以減少對CPU的利用時間,單片機將有更多的時間去完成其他功能。
4.4 系統軟件設計說明
本系統軟件采用模塊化結構,由主程序、定時子程序、避障子程序p中斷子程序、顯示子程序p調速子程序p算法子程序構成。

伺服電機相關文章:伺服電機工作原理







評論